Vehicle Attribute Recognition Pipeline Tutorial¶
1. Introduction to Vehicle Attribute Recognition Pipeline¶
Vehicle attribute recognition is a crucial component in computer vision systems. Its primary task is to locate and label specific attributes of vehicles in images or videos, such as vehicle type, color, and license plate number. This task not only requires accurately detecting vehicles but also identifying detailed attribute information for each vehicle. The vehicle attribute recognition pipeline is an end-to-end serial system for locating and recognizing vehicle attributes, widely used in traffic management, intelligent parking, security surveillance, autonomous driving, and other fields. It significantly enhances system efficiency and intelligence levels, driving the development and innovation of related industries. This pipeline also offers a flexible serving deployment approach, supporting the use of multiple programming languages on various hardware platforms. Moreover, this pipeline provides the capability for custom development. You can train and optimize models on your own dataset based on this pipeline, and the trained models can be seamlessly integrated.
 The vehicle attribute recognition pipeline includes a vehicle detection module and a vehicle attribute recognition module, with several models in each module. Which models to use can be selected based on the benchmark data below. If you prioritize model accuracy, choose models with higher accuracy; if you prioritize inference speed, choose models with faster inference; if you prioritize model storage size, choose models with smaller storage.
The vehicle attribute recognition pipeline includes a vehicle detection module and a vehicle attribute recognition module, with several models in each module. Which models to use can be selected based on the benchmark data below. If you prioritize model accuracy, choose models with higher accuracy; if you prioritize inference speed, choose models with faster inference; if you prioritize model storage size, choose models with smaller storage.
The inference time only includes the model inference time and does not include the time for pre- or post-processing.
Vehicle Detection Module:
| Model | Model Download Link | mAP 0.5:0.95 | GPU Inference Time (ms) [Normal Mode / High-Performance Mode] |
CPU Inference Time (ms) [Normal Mode / High-Performance Mode] |
Model Storage Size (MB) | Description |
|---|---|---|---|---|---|---|
| PP-YOLOE-S_vehicle | Inference Model/Training Model | 61.3 | 10.54 / 6.69 | 52.73 / 23.58 | 28.79 | Vehicle detection model based on PP-YOLOE |
| PP-YOLOE-L_vehicle | Inference Model/Training Model | 63.9 | 30.30 / 26.27 | 169.28 / 111.88 | 196.02 |
Vehicle Attribute Recognition Module:
| Model | Model Download Link | mAP (%) | GPU Inference Time (ms) [Normal Mode / High-Performance Mode] |
CPU Inference Time (ms) [Normal Mode / High-Performance Mode] |
Model Storage Size (MB) | Description |
|---|---|---|---|---|---|---|
| PP-LCNet_x1_0_vehicle_attribute | Inference Model/Training Model | 91.7 | 2.53 / 0.67 | 2.73 / 1.10 | 6.7 | PP-LCNet_x1_0_vehicle_attribute is a lightweight vehicle attribute recognition model based on PP-LCNet. |
Test Environment Description:
- Performance Test Environment
- Test Dataset:
- Vehicle Detection Model: PPVehicle Validation Set.
- Vehicle Attribute Recognition Model: VeRi Validation Set.
- Hardware Configuration:
- GPU: NVIDIA Tesla T4
- CPU: Intel Xeon Gold 6271C @ 2.60GHz
- Software Environment:
- Ubuntu 20.04 / CUDA 11.8 / cuDNN 8.9 / TensorRT 8.6.1.6
- paddlepaddle 3.0.0 / paddlex 3.0.3
- Test Dataset:
</li>
<li><b>Inference Mode Description</b></li>
| Mode | GPU Configuration | CPU Configuration | Acceleration Technology Combination |
|---|---|---|---|
| Normal Mode | FP32 Precision / No TRT Acceleration | FP32 Precision / 8 Threads | PaddleInference |
| High-Performance Mode | Optimal combination of pre-selected precision types and acceleration strategies | FP32 Precision / 8 Threads | Pre-selected optimal backend (Paddle/OpenVINO/TRT, etc.) |
2. Quick Start¶
All model pipelines provided by PaddleX can be quickly experienced. You can experience the effect of the vehicle attribute recognition pipeline on the community platform, or you can use the command line or Python locally to experience the effect of the vehicle attribute recognition pipeline.
2.1 Online Experience¶
You can experience the vehicle attribute recognition pipeline by recognizing the demo images provided by the official platform, for example:

If you are satisfied with the performance of the pipeline, you can directly integrate and deploy it. You can choose to download the deployment package from the cloud, or refer to the methods in Section 2.2 Local Experience for local deployment. If you are not satisfied with the effect, you can fine-tune the models in the pipeline using your private data. If you have local hardware resources for training, you can start training directly on your local machine; if not, the Star River Zero-Code platform provides a one-click training service. You don't need to write any code—just upload your data and start the training task with one click.
2.2 Local Experience¶
Before using the vehicle attribute recognition pipeline locally, please ensure that you have completed the installation of the PaddleX wheel package according to the PaddleX Local Installation Guide. If you wish to selectively install dependencies, please refer to the relevant instructions in the installation guide. The dependency group corresponding to this pipeline is cv.
2.2.1 Command Line Experience¶
You can quickly experience the vehicle attribute recognition pipeline with a single command. Use the test file and replace --input with the local path for prediction.
{kind=link}
paddlex --pipeline vehicle_attribute_recognition --input vehicle_attribute_002.jpg --device gpu:0 --save_path ./output/
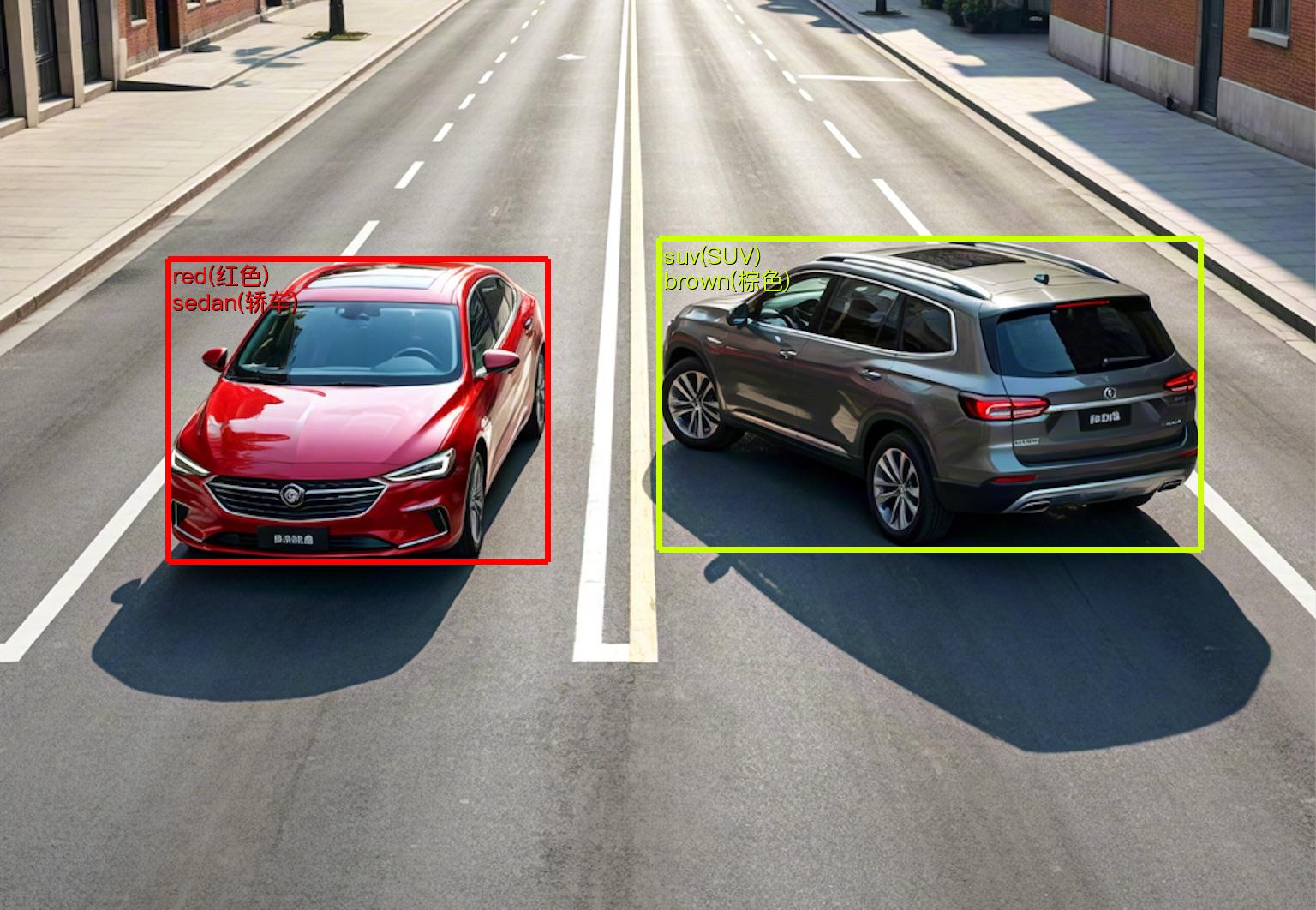
{'res': {'input_path': 'vehicle_attribute_002.jpg', 'boxes': [{'labels': ['red(红色)', 'sedan(轿车)'], 'cls_scores': array([0.96375, 0.94025]), 'det_score': 0.9774094820022583, 'coordinate': [196.32553, 302.3847, 639.3131, 655.57904]}, {'labels': ['suv(SUV)', 'brown(棕色)'], 'cls_scores': array([0.99968, 0.99317]), 'det_score': 0.9705657958984375, 'coordinate': [769.4419, 278.8417, 1401.0217, 641.3569]}]}}
For the explanation of the running result parameters, you can refer to the result interpretation in Section 2.2.2 Integration via Python Script. Supports specifying multiple devices simultaneously for parallel inference. For details, please refer to the documentation on pipeline parallel inference.
The visualization results are saved under save_path, and the visualization result is as follows:
2.2.2 Integration via Python Script¶
- The above command line is for quick experience and viewing of results. Generally, in projects, integration through code is often required. You can complete the pipeline's fast inference with just a few lines of code. The inference code is as follows:
The results obtained are the same as those from the command line method.
In the above Python script, the following steps are executed:
(1) The vehicle attribute recognition pipeline object is instantiated via create_pipeline(). The specific parameter descriptions are as follows:
| Parameter | Parameter Description | Parameter Type | Default Value | |
|---|---|---|---|---|
pipeline |
The name of the pipeline or the path to the pipeline configuration file. If it is the name of a pipeline, it must be supported by PaddleX. | str |
None | |
config |
Specific configuration information for the pipeline (if set simultaneously with pipeline, it has higher priority than pipeline, and the pipeline name must be consistent with pipeline). |
dict[str, Any] |
None |
|
device |
The device used for pipeline inference. It supports specifying the specific card number of GPUs, such as "gpu:0", other hardware card numbers, such as "npu:0", and CPUs, such as "cpu". Supports specifying multiple devices simultaneously for parallel inference. For details, please refer to Pipeline Parallel Inference. | str |
gpu:0 |
|
use_hpip |
Whether to enable the high-performance inference plugin. If set to None, the setting from the configuration file or config will be used. |
bool |
None | None |
hpi_config |
High-performance inference configuration | dict | None |
None | None |
(2) The predict() method of the vehicle attribute recognition pipeline object is called to perform inference prediction. This method returns a generator. Below are the parameters and their descriptions for the predict() method:
| Parameter | Parameter Description | Parameter Type | Options | Default Value |
|---|---|---|---|---|
input |
The data to be predicted. It supports multiple input types and is required. | Python Var|str|list |
|
None |
det_threshold |
Threshold for vehicle detection visualization. | float | None |
|
0.5 |
cls_threshold |
Threshold for vehicle attribute prediction. | float | dict | list | None |
|
0.7 |
3) Process the prediction results. Each sample's prediction result is of type dict, and supports operations such as printing, saving as an image, and saving as a json file:
| Method | Description | Parameter | Type | Description | Default Value |
|---|---|---|---|---|---|
print() |
Print the result to the terminal. | format_json |
bool |
Whether to format the output content using JSON indentation. |
True |
indent |
int |
Specify the indentation level to beautify the output JSON data, making it more readable. This is only effective when format_json is True. |
4 | ||
ensure_ascii |
bool |
Control whether to escape non-ASCII characters to Unicode. If set to True, all non-ASCII characters will be escaped; False will retain the original characters. This is only effective when format_json is True. |
False |
||
save_to_json() |
Save the result as a JSON file. | save_path |
str |
The file path to save the result. When specified as a directory, the saved file will have the same name as the input file. | None |
indent |
int |
Specify the indentation level to beautify the output JSON data, making it more readable. This is only effective when format_json is True. |
4 | ||
ensure_ascii |
bool |
Control whether to escape non-ASCII characters to Unicode. If set to True, all non-ASCII characters will be escaped; False will retain the original characters. This is only effective when format_json is True. |
False |
||
save_to_img() |
Save the result as an image file. | save_path |
str |
The file path to save the result, supporting both directory and file paths. | None |
-
When calling the
print()method, the result will be printed to the terminal. The printed content is explained as follows:input_path:(str)The input path of the image to be predicted.page_index:(Union[int, None])If the input is a PDF file, it indicates the current page number of the PDF; otherwise, it isNone.boxes:(List[Dict])The category IDs of the prediction results.labels:(List[str])The category names of the prediction results.cls_scores:(List[numpy.ndarray])The confidence scores of the attribute prediction results.det_scores:(float)The confidence scores of the vehicle detection boxes.
-
Calling the
save_to_json()method will save the above content to the specifiedsave_path. If a directory is specified, the saved path will besave_path/{your_img_basename}_res.json. If a file is specified, it will be saved directly to that file. Since JSON files do not support saving numpy arrays, thenumpy.arraytype will be converted to a list format. -
Calling the
save_to_img()method will save the visualization result to the specifiedsave_path. If a directory is specified, the saved path will besave_path/{your_img_basename}_res.{your_img_extension}. If a file is specified, it will be saved directly to that file. (The pipeline usually contains many result images, so it is not recommended to specify a specific file path directly, otherwise multiple images will be overwritten, and only the last image will be retained.) -
Additionally, it also supports obtaining visualized images with results and prediction results through attributes, as follows:
| Attribute | Description |
|---|---|
json |
Get the prediction result in json format |
img |
Get the visualized image in dict format |
- The prediction result obtained through the
jsonattribute is of typedict, and its content is consistent with the result saved by thesave_to_json()method. - The prediction result returned by the
imgattribute is a dictionary. The keyrescorresponds to the value of anImage.Imageobject: a visualized image displaying the attribute recognition result.
Additionally, you can obtain the vehicle attribute recognition pipeline configuration file and load the configuration file for prediction. You can execute the following command to save the result in my_path:
If you have obtained the configuration file, you can customize the settings for the Vehicle Attribute Recognition pipeline by simply modifying the pipeline parameter value in the create_pipeline method to the path of the configuration file. The example is as follows:
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline="./my_path/vehicle_attribute_recognition.yaml")
output = pipeline.predict(
input="./vehicle_attribute_002.jpg",
)
for res in output:
res.print()
res.save_to_img("./output/")
res.save_to_json("./output/")
Note: The parameters in the configuration file are initialization parameters for the pipeline. If you wish to change the initialization parameters for the vehicle attribute recognition pipeline, you can directly modify the parameters in the configuration file and load the configuration file for prediction. Additionally, CLI prediction also supports passing in a configuration file by specifying the path of the configuration file with --pipeline.
3. Development Integration/Deployment¶
If the pipeline meets your requirements for inference speed and accuracy, you can proceed directly with development integration/deployment.
If you need to integrate the pipeline into your Python project, you can refer to the example code in 2.2.2 Python Script Method.
In addition, PaddleX also provides three other deployment methods, which are detailed as follows:
🚀 High-Performance Inference: In practical production environments, many applications have strict standards for the performance metrics of deployment strategies, especially response speed, to ensure efficient system operation and smooth user experience. To this end, PaddleX offers a high-performance inference plugin aimed at deeply optimizing the performance of model inference and pre/post-processing, significantly speeding up the end-to-end process. For detailed high-performance inference procedures, please refer to the PaddleX High-Performance Inference Guide.
☁️ Serving Deployment: Serving Deployment is a common form of deployment in practical production environments. By encapsulating inference capabilities into services, clients can access these services via network requests to obtain inference results. PaddleX supports various pipeline serving deployment solutions. For detailed pipeline serving deployment procedures, please refer to the PaddleX Serving Deployment Guide.
Below are the API references for basic serving deployment and multi-language service invocation examples:
API Reference
For the main operations provided by the service:
- The HTTP request method is POST.
- Both the request body and response body are JSON data (JSON objects).
- When the request is processed successfully, the response status code is
200, and the attributes of the response body are as follows:
| Name | Type | Description |
|---|---|---|
logId |
string |
The UUID of the request. |
errorCode |
integer |
Error code. Fixed as 0. |
errorMsg |
string |
Error message. Fixed as "Success". |
result |
object |
The result of the operation. |
- When the request is not processed successfully, the attributes of the response body are as follows:
| Name | Type | Description |
|---|---|---|
logId |
string |
The UUID of the request. |
errorCode |
integer |
Error code. Same as the response status code. |
errorMsg |
string |
Error message. |
The main operations provided by the service are as follows:
infer
Get the vehicle attribute recognition results.
POST /vehicle-attribute-recognition
- The attributes of the request body are as follows:
| Name | Type | Description | Required |
|---|---|---|---|
image |
string |
The URL of the image file accessible by the server or the Base64-encoded content of the image file. | Yes |
detThreshold |
number | null |
Please refer to the description of the det_threshold parameter of the pipeline object's predict method. |
No |
clsThreshold |
number | array | object | null |
Please refer to the description of the cls_threshold parameter of the pipeline object's predict method. |
No |
visualize |
boolean | null |
Whether to return the final visualization image and intermediate images during the processing.
For example, adding the following setting to the pipeline config file: visualize parameter in the request.If neither the request body nor the configuration file is set (If visualize is set to null in the request and not defined in the configuration file), the image is returned by default.
|
No |
- When the request is processed successfully, the
resultof the response body has the following attributes:
| Name | Type | Description |
|---|---|---|
vehicles |
array |
Information about the vehicle's location and attributes. |
image |
string| null |
The vehicle attribute recognition result image. The image is in JPEG format and is Base64-encoded. |
Each element in vehicles is an object with the following attributes:
| Name | Type | Description |
|---|---|---|
bbox |
array |
The location of the vehicle. The elements in the array are the x-coordinate of the top-left corner, the y-coordinate of the top-left corner, the x-coordinate of the bottom-right corner, and the y-coordinate of the bottom-right corner. |
attributes |
array |
The attributes of the vehicle. |
score |
number |
Detection score. |
Each element in attributes is an object with the following attributes:
| Name | Type | Description |
|---|---|---|
label |
string |
The attribute label. |
score |
number |
Classification score. |
Multi-Language Service Call Examples
Python
import base64
import requests
API_URL = "http://localhost:8080/vehicle-attribute-recognition" # Service URL
image_path = "./demo.jpg"
output_image_path = "./out.jpg"
# Encode the local image using Base64
with open(image_path, "rb") as file:
image_bytes = file.read()
image_data = base64.b64encode(image_bytes).decode("ascii")
payload = {"image": image_data} # Base64-encoded file content or image URL
# Call the API
response = requests.post(API_URL, json=payload)
# Process the response data
assert response.status_code == 200
result = response.json()["result"]
with open(output_image_path, "wb") as file:
file.write(base64.b64decode(result["image"]))
print(f"Output image saved at {output_image_path}")
print("\nDetected vehicles:")
print(result["vehicles"])
📱 On-Device Deployment: Edge deployment is a method of placing computing and data processing capabilities directly on user devices, allowing them to process data locally without relying on remote servers. PaddleX supports deploying models on edge devices such as Android. For detailed instructions, please refer to the PaddleX On-Device Deployment Guide. You can choose the appropriate deployment method based on your needs to integrate the model pipeline into your AI application.
4. Custom Development¶
If the default model weights provided by the vehicle attribute recognition pipeline do not meet your requirements in terms of accuracy or speed, you can attempt to further fine-tune the existing models using your own domain-specific or application-specific data to improve the recognition performance of the vehicle attribute recognition pipeline in your scenario.
4.1 Model Fine-Tuning¶
Since the vehicle attribute recognition pipeline includes both a vehicle detection module and a vehicle attribute recognition module, if the performance of the pipeline is not satisfactory, the issue may lie in either of these modules. You can analyze the images with poor recognition results to determine which module is problematic and refer to the corresponding fine-tuning tutorial links in the table below for model fine-tuning.
| Scenario | Fine-Tuning Module | Fine-Tuning Reference Link |
|---|---|---|
| Inaccurate vehicle detection | Vehicle Detection Module | Link |
| Inaccurate attribute recognition | Vehicle Attribute Recognition Module | Link |
Note: The parameters in the configuration file are initialization parameters for the pipeline. If you wish to change the initialization parameters for the vehicle attribute recognition pipeline, you can directly modify the parameters in the configuration file and load the configuration file for prediction. Additionally, CLI prediction also supports passing in a configuration file by specifying the path of the configuration file with --pipeline.
3. Development Integration/Deployment¶
If the pipeline meets your requirements for inference speed and accuracy, you can proceed directly with development integration/deployment.
If you need to integrate the pipeline into your Python project, you can refer to the example code in 2.2.2 Python Script Method.
In addition, PaddleX also provides three other deployment methods, which are detailed as follows:
🚀 High-Performance Inference: In practical production environments, many applications have strict standards for the performance metrics of deployment strategies, especially response speed, to ensure efficient system operation and smooth user experience. To this end, PaddleX offers a high-performance inference plugin aimed at deeply optimizing the performance of model inference and pre/post-processing, significantly speeding up the end-to-end process. For detailed high-performance inference procedures, please refer to the PaddleX High-Performance Inference Guide.
☁️ Serving Deployment: Serving Deployment is a common form of deployment in practical production environments. By encapsulating inference capabilities into services, clients can access these services via network requests to obtain inference results. PaddleX supports various pipeline serving deployment solutions. For detailed pipeline serving deployment procedures, please refer to the PaddleX Serving Deployment Guide.
Below are the API references for basic serving deployment and multi-language service invocation examples:
pipeline_name: vehicle_attribute_recognition
SubModules:
Detection:
module_name: object_detection
model_name: PP-YOLOE-L_vehicle
model_dir: null # Replace with the path to the fine-tuned vehicle detection model weights
batch_size: 1
threshold: 0.5
Classification:
module_name: multilabel_classification
model_name: PP-LCNet_x1_0_vehicle_attribute
model_dir: null # Replace with the path to the fine-tuned vehicle attribute recognition model weights
batch_size: 1
threshold: 0.7
Subsequently, you can load the modified pipeline configuration file using the command line or Python script methods described in the local experience section.
5. Multi-Hardware Support¶
PaddleX supports a variety of mainstream hardware devices, including NVIDIA GPU, Kunlunxin XPU, Ascend NPU, and Cambricon MLU. Simply modify the --device parameter to seamlessly switch between different hardware.
For example, if you are using Ascend NPU for vehicle attribute recognition inference, the Python command is as follows:
paddlex --pipeline vehicle_attribute_recognition \
--input vehicle_attribute_002.jpg \
--device npu:0
If you want to use the general Vehicle Attribute Recognition pipeline on a wider range of hardware devices, please refer to the PaddleX Multi-Hardware Usage Guide.