Home
![]()
![]()
![]()
![]()
![]()
🔍 简介¶
PaddleX 3.0 是基于飞桨框架构建的低代码开发工具,它集成了众多开箱即用的预训练模型,可以实现模型从训练到推理的全流程开发,支持国内外多款主流硬件,助力AI 开发者进行产业实践。
| 通用图像分类 | 图像多标签分类 | 通用目标检测 | 通用实例分割 |
|---|---|---|---|
 |
|||
| 通用语义分割 | 图像异常检测 | 通用OCR | 通用表格识别 |
 |
|||
| 文本图像智能分析 | 时序预测 | 时序异常检测 | 时序分类 |
🛠️ 安装¶
Warning
安装 PaddleX 前请先确保您有基础的 Python 运行环境(注:当前支持Python 3.8 ~ Python 3.10下运行,更多Python版本适配中)。
安装 PaddlePaddle¶
❗ 更多飞桨 Wheel 版本请参考飞桨官网。
安装PaddleX¶
❗ 更多安装方式参考 PaddleX 安装教程
💻 命令行使用¶
一行命令即可快速体验产线效果,统一的命令行格式为:
只需指定三个参数:
pipeline:产线名称input:待处理的输入文件(如图片)的本地路径或 URLdevice: 使用的 GPU 序号(例如gpu:0表示使用第 0 块 GPU),也可选择使用 CPU(cpu)
OCR相关产线命令行使用
paddlex --pipeline OCR --input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/general_ocr_002.png --device gpu:0 --save_path output
- 运行后,输出结果及可视化图片将被保存在
output文件夹下。您也可以通过修改--save_path参数自定义保存路径。
查看运行结果
{'input_path': '/root/.paddlex/predict_input/general_ocr_002.png',
'dt_polys': [array([[161, 27],
[353, 22],
[354, 69],
[162, 74]], dtype=int16), array([[426, 26],
[657, 21],
[657, 58],
[426, 62]], dtype=int16), array([[702, 18],
[822, 13],
[824, 57],
[704, 62]], dtype=int16), array([[341, 106],
[405, 106],
[405, 128],
[341, 128]], dtype=int16)
...],
'dt_scores': [0.758478200014338, 0.7021546472698513, 0.8536622648391111, 0.8619181462164781, 0.8321051217096188, 0.8868756173427551, 0.7982964727675609, 0.8289939036796322, 0.8289428877522524, 0.8587063317632897, 0.7786755892491615, 0.8502032769081344, 0.8703346500042997, 0.834490931790065, 0.908291103353393, 0.7614978661708064, 0.8325774055997542, 0.7843421347676149, 0.8680889482955594, 0.8788859304537682, 0.8963341277518075, 0.9364654810069546, 0.8092413027028257, 0.8503743089091863, 0.7920740420391101, 0.7592224394793805, 0.7920547400069311, 0.6641757962457888, 0.8650289477605955, 0.8079483304467047, 0.8532207681055275, 0.8913377034754717],
'rec_text': ['登机牌', 'BOARDING', 'PASS', '舱位', 'CLASS', '序号 SERIALNO.', '座位号', '日期 DATE', 'SEAT NO', '航班 FLIGHW', '035', 'MU2379', '始发地', 'FROM', '登机口', 'GATE', '登机时间BDT', '目的地TO', '福州', 'TAIYUAN', 'G11', 'FUZHOU', '身份识别IDNO', '姓名NAME', 'ZHANGQIWEI', 票号TKTNO', '张祺伟', '票价FARE', 'ETKT7813699238489/1', '登机口于起飞前10分钟关闭GATESCLOSE10MINUTESBEFOREDEPARTURETIME'],
'rec_score': [0.9985831379890442, 0.999696917533874512, 0.9985735416412354, 0.9842517971992493, 0.9383274912834167, 0.9943678975105286, 0.9419361352920532, 0.9221674799919128, 0.9555020928382874, 0.9870321154594421, 0.9664073586463928, 0.9988052248954773, 0.9979352355003357, 0.9985110759735107, 0.9943482875823975, 0.9991195797920227, 0.9936401844024658, 0.9974591135978699, 0.9743705987930298, 0.9980487823486328, 0.9874696135520935, 0.9900962710380554, 0.9952947497367859, 0.9950481653213501, 0.989926815032959, 0.9915552139282227, 0.9938777685165405, 0.997239887714386, 0.9963340759277344, 0.9936134815216064, 0.97223961353302]}
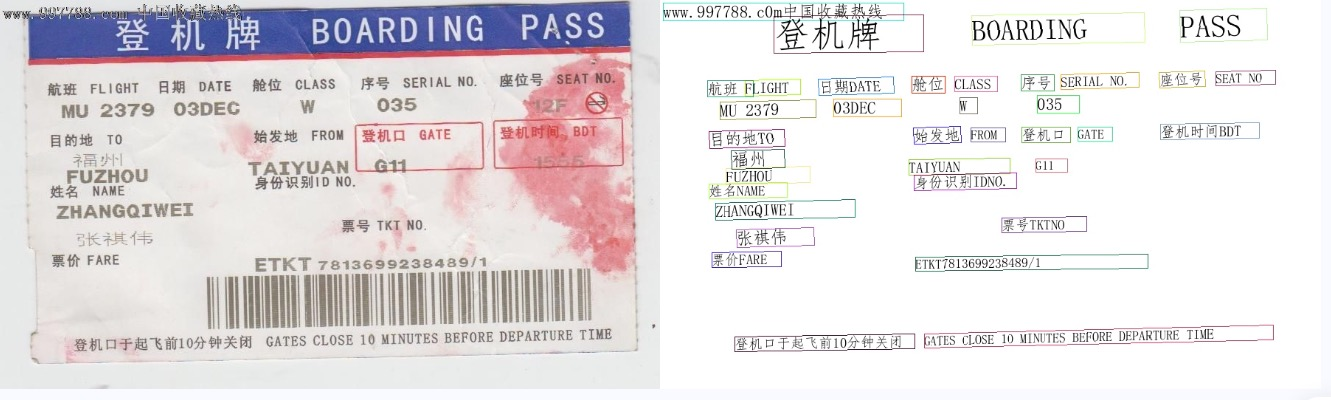
paddlex --pipeline table_recognition --input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/table_recognition.jpg --device gpu:0 --save_path output
- 运行后,输出结果及可视化图片将被保存在
output文件夹下。您也可以通过修改--save_path参数自定义保存路径。
查看运行结果
{'input_path': '/root/.paddlex/predict_input/table_recognition.jpg', 'layout_result': {'input_path': '/root/.paddlex/predict_input/table_recognition.jpg', 'boxes': [{'cls_id': 3, 'label': 'Table', 'score': 0.6014542579650879, 'coordinate': [0, 21, 551, 118]}]}, 'ocr_result': {'dt_polys': [array([[37., 40.],
[75., 40.],
[75., 60.],
[37., 60.]], dtype=float32), array([[123., 37.],
[200., 37.],
[200., 59.],
[123., 59.]], dtype=float32), array([[227., 37.],
[391., 37.],
[391., 58.],
[227., 58.]], dtype=float32), array([[416., 36.],
[535., 38.],
[535., 61.],
[415., 58.]], dtype=float32), array([[35., 73.],
[78., 73.],
[78., 92.],
[35., 92.]], dtype=float32), array([[287., 73.],
[328., 73.],
[328., 92.],
[287., 92.]], dtype=float32), array([[453., 72.],
[495., 72.],
[495., 94.],
[453., 94.]], dtype=float32), array([[ 17., 103.],
[ 94., 103.],
[ 94., 118.],
[ 17., 118.]], dtype=float32), array([[145., 104.],
[178., 104.],
[178., 118.],
[145., 118.]], dtype=float32), array([[277., 104.],
[337., 102.],
[338., 118.],
[278., 118.]], dtype=float32), array([[446., 102.],
[504., 104.],
[503., 118.],
[445., 118.]], dtype=float32)], 'rec_text': ['Dres', '连续工作3', '取出来放在网上,没想', '江、整江等八大', 'Abstr', 'rSrivi', '$709.', 'cludingGiv', '2.72', 'Ingcubic', '$744.78'], 'rec_score': [0.9934158325195312, 0.9990204572677612, 0.9967061877250671, 0.9375461935997009, 0.9947397112846375, 0.9972746968269348, 0.9904290437698364, 0.973427414894104, 0.9983080625534058, 0.993423342704773, 0.9964120984077454], 'input_path': 'table_recognition.jpg'}, 'table_result': [{'input_path': 'table_recognition.jpg', 'layout_bbox': [0, 21, 551, 118], 'bbox': array([[ 4.395736 , 25.238262 , 113.31014 , 25.316246 , 115.454315 ,
71.8867 , 3.7177477, 71.7937 ],
[110.727455 , 25.94007 , 210.07187 , 26.028755 , 209.66394 ,
65.96484 , 109.59861 , 66.09809 ],
[214.45381 , 26.027939 , 407.95276 , 26.112846 , 409.6684 ,
66.91336 , 215.27292 , 67.002014 ],
[402.81863 , 26.123789 , 549.03656 , 26.231564 , 549.19995 ,
66.88339 , 404.48068 , 66.74034 ],
[ 2.4458022, 64.68588 , 102.7665 , 65.10228 , 105.79447 ,
96.051254 , 2.5367072, 95.35514 ],
[108.85877 , 65.80549 , 211.70216 , 66.02091 , 210.79245 ,
94.75581 , 107.59308 , 94.42664 ],
[217.05621 , 64.98496 , 407.76328 , 65.133484 , 406.8436 ,
96.00133 , 214.67896 , 95.87226 ],
[401.73572 , 64.60494 , 547.9967 , 64.73921 , 548.19135 ,
96.09901 , 402.26733 , 95.95529 ],
[ 2.4882016, 93.589554 , 107.01325 , 93.67592 , 107.8446 ,
120.13259 , 2.508764 , 119.85027 ],
[110.773125 , 93.98633 , 213.354 , 94.08046 , 212.46033 ,
120.80207 , 109.29008 , 120.613045 ],
[216.08781 , 94.19984 , 405.843 , 94.28341 , 405.9974 ,
121.33152 , 215.10301 , 121.299034 ],
[403.92212 , 94.44883 , 548.30963 , 94.54982 , 548.4949 ,
122.610176 , 404.53433 , 122.49881 ]], dtype=float32), 'img_idx': 0, 'html': '<html><body><table><tr><td>Dres</td><td>连续工作3</td><td>取出来放在网上,没想</td><td>江、整江等八大</td></tr><tr><td>Abstr</td><td></td><td>rSrivi</td><td>$709.</td></tr><tr><td>cludingGiv</td><td>2.72</td><td>Ingcubic</td><td>$744.78</td></tr></table></body></html>'}]}

paddlex --pipeline layout_parsing --input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/demo_paper.png --device gpu:0 --save_path output
- 运行后,输出结果及可视化图片将被保存在
output文件夹下。您也可以通过修改--save_path参数自定义保存路径。
查看运行结果
{'input_path': PosixPath('/root/.paddlex/temp/tmp5jmloefs.png'), 'parsing_result': [{'input_path': PosixPath('/root/.paddlex/temp/tmpshsq8_w0.png'), 'layout_bbox': [51.46833, 74.22329, 542.4082, 232.77504], 'image': {'img': array([[[255, 255, 255],
[255, 255, 255],
[255, 255, 255],
...,
[213, 221, 238],
[217, 223, 240],
[233, 234, 241]],
[[255, 255, 255],
[255, 255, 255],
[255, 255, 255],
...,
[255, 255, 255],
[255, 255, 255],
[255, 255, 255]]], dtype=uint8), 'image_text': ''}, 'layout': 'single'}, {'input_path': PosixPath('/root/.paddlex/temp/tmpcd2q9uyu.png'), 'layout_bbox': [47.68295, 243.08054, 546.28253, 295.71045], 'figure_title': 'Overview of RT-DETR, We feed th', 'layout': 'single'}, {'input_path': PosixPath('/root/.paddlex/temp/tmpr_iqa8b3.png'), 'layout_bbox': [58.416977, 304.1531, 275.9134, 400.07513], 'image': {'img': array([[[255, 255, 255],
[255, 255, 255],
[255, 255, 255],
...,
[255, 255, 255],
[255, 255, 255],
[255, 255, 255]]], dtype=uint8), 'image_text': ''}, 'layout': 'left'}, {'input_path': PosixPath('/root/.paddlex/temp/tmphpblxl3p.png'), 'layout_bbox': [100.62961, 405.97458, 234.79774, 414.77414], 'figure_title': 'Figure 5. The fusion block in CCFF.', 'layout': 'left'}, {'input_path': PosixPath('/root/.paddlex/temp/tmplgnczrsf.png'), 'layout_bbox': [47.81724, 421.9041, 288.01566, 550.538], 'text': 'D, Ds, not only significantly reduces latency (35% faster),\nRut\nnproves accuracy (0.4% AP higher), CCFF is opti\nased on the cross-scale fusion module, which\nnsisting of convolutional lavers intc\npath.\nThe role of the fusion block is t\n into a new feature, and its\nFigure 5. The f\nblock contains tw\n1 x1\nchannels, /V RepBlock\n. anc\n: two-path outputs are fused by element-wise add. We\ntormulate the calculation ot the hvbrid encoder as:', 'layout': 'left'}, {'input_path': PosixPath('/root/.paddlex/temp/tmpsq0ey9md.png'), 'layout_bbox': [94.60716, 558.703, 288.04193, 600.19434], 'formula': '\\begin{array}{l}{{\\Theta=K=\\mathrm{p.s.sp{\\pm}}\\mathrm{i.s.s.}(\\mathrm{l.s.}(\\mathrm{l.s.}(\\mathrm{l.s.}}),{\\qquad\\mathrm{{a.s.}}\\mathrm{s.}}}\\\\ {{\\tau_{\\mathrm{{s.s.s.s.s.}}(\\mathrm{l.s.},\\mathrm{l.s.},\\mathrm{s.s.}}\\mathrm{s.}\\mathrm{s.}}\\end{array}),}}\\\\ {{\\bar{\\mathrm{e-c.c.s.s.}(\\mathrm{s.},\\mathrm{s.s.},\\ s_{s}}\\mathrm{s.s.},\\tau),}}\\end{array}', 'layout': 'left'}, {'input_path': PosixPath('/root/.paddlex/temp/tmpv30qy0v4.png'), 'layout_bbox': [47.975555, 607.12024, 288.5776, 629.1252], 'text': 'tened feature to the same shape as Ss.\nwhere Re shape represents restoring the shape of the flat-', 'layout': 'left'}, {'input_path': PosixPath('/root/.paddlex/temp/tmp0jejzwwv.png'), 'layout_bbox': [48.383354, 637.581, 245.96404, 648.20496], 'paragraph_title': '4.3. Uncertainty-minimal Query Selection', 'layout': 'left'}, {'input_path': PosixPath('/root/.paddlex/temp/tmpushex416.png'), 'layout_bbox': [47.80134, 656.002, 288.50192, 713.24994], 'text': 'To reduce the difficulty of optimizing object queries in\nDETR, several subsequent works [42, 44, 45] propose query\nselection schemes, which have in common that they use the\nconfidence score to select the top K’ features from the en-\ncoder to initialize object queries (or just position queries).', 'layout': 'left'}, {'input_path': PosixPath('/root/.paddlex/temp/tmpki7e_6wc.png'), 'layout_bbox': [306.6371, 302.1026, 546.3772, 419.76724], 'text': 'The confidence score represents the likelihood that the fea\nture includes foreground objects. Nevertheless, the \nare required to simultaneously model the category\nojects, both of which determine the quality of the\npertor\ncore of the fes\nBased on the analysis, the current query\n considerable level of uncertainty in the\nresulting in sub-optimal initialization for\nand hindering the performance of the detector.', 'layout': 'right'}, {'input_path': PosixPath('/root/.paddlex/temp/tmppbxrfehp.png'), 'layout_bbox': [306.0642, 422.7347, 546.9216, 539.45734], 'text': 'To address this problem, we propose the uncertainty mini\nmal query selection scheme, which explicitly const\noptim\n the epistemic uncertainty to model the\nfeatures, thereby providing \nhigh-quality\nr the decoder. Specifically,\n the discrepancy between i\nalization P\nand classificat\n.(2\ntunction for the gradie', 'layout': 'right'}, {'input_path': PosixPath('/root/.paddlex/temp/tmp1mgiyd21.png'), 'layout_bbox': [331.52808, 549.32635, 546.5229, 586.15546], 'formula': '\\begin{array}{c c c}{{}}&{{}}&{{\\begin{array}{c}{{i\\langle X\\rangle=({\\bar{Y}}({\\bar{X}})+{\\bar{Z}}({\\bar{X}})\\mid X\\in{\\bar{\\pi}}^{\\prime}}}&{{}}\\\\ {{}}&{{}}&{{}}\\end{array}}}&{{\\emptyset}}\\\\ {{}}&{{}}&{{C(\\bar{X},{\\bar{X}})=C..\\scriptstyle(\\bar{0},{\\bar{Y}})+{\\mathcal{L}}_{{\\mathrm{s}}}({\\bar{X}}),\\ 6)}}&{{}}\\end{array}', 'layout': 'right'}, {'input_path': PosixPath('/root/.paddlex/temp/tmp8t73dpym.png'), 'layout_bbox': [306.44016, 592.8762, 546.84314, 630.60126], 'text': 'where and y denote the prediction and ground truth,\n= (c, b), c and b represent the category and bounding\nbox respectively, X represent the encoder feature.', 'layout': 'right'}, {'input_path': PosixPath('/root/.paddlex/temp/tmpftnxeyjm.png'), 'layout_bbox': [306.15652, 632.3142, 546.2463, 713.19073], 'text': 'Effectiveness analysis. To analyze the effectiveness of the\nuncertainty-minimal query selection, we visualize the clas-\nsificatior\nscores and IoU scores of the selected fe\nCOCO\na 12017, Figure 6. We draw the scatterplo\nt with\ndots\nrepresent the selected features from the model trained\nwith uncertainty-minimal query selection and vanilla query', 'layout': 'right'}]}
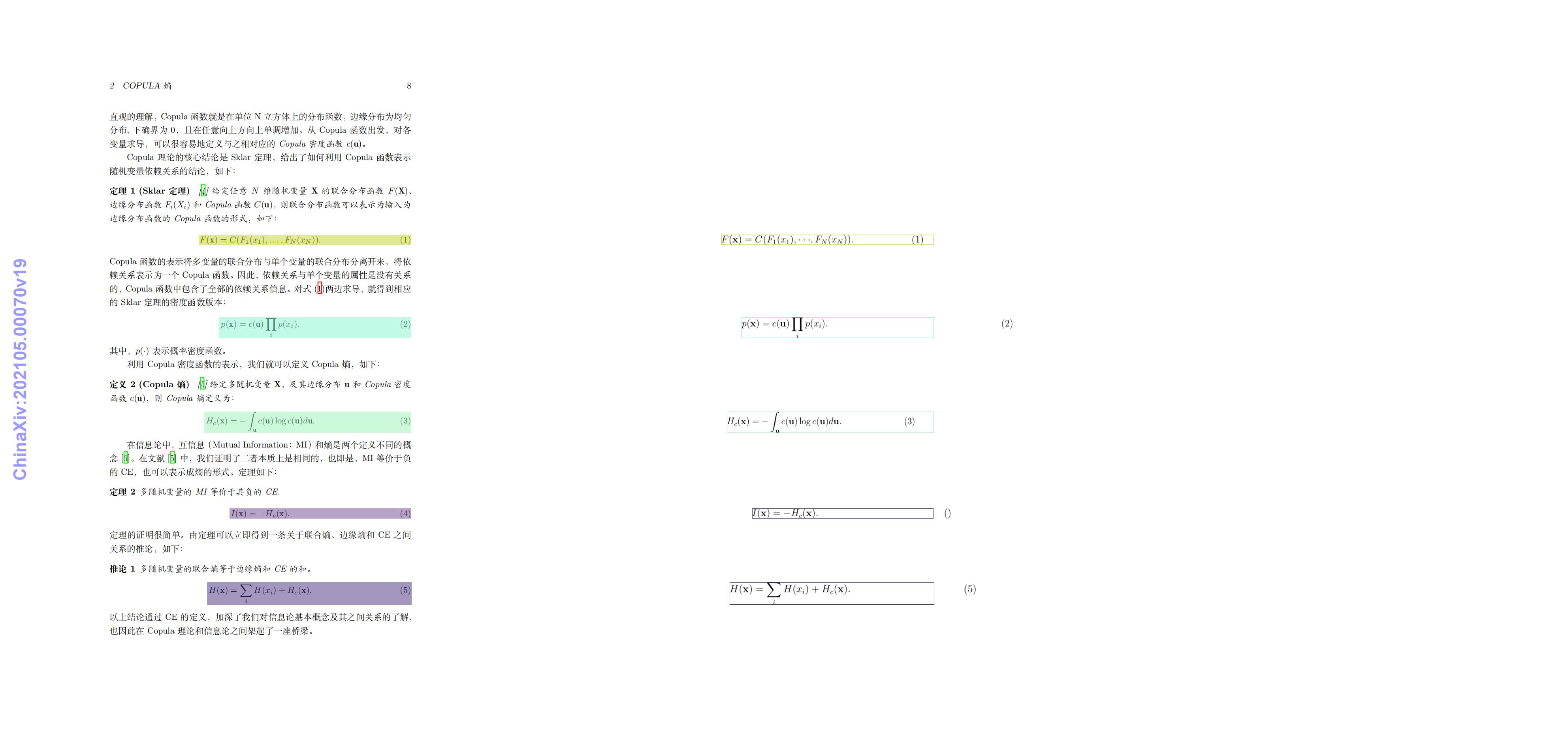
paddlex --pipeline formula_recognition --input https://paddle-model-ecology.bj.bcebos.com/paddlex/demo_image/general_formula_recognition.png --device gpu:0 --save_path output
- 运行后,输出结果及可视化图片将被保存在
output文件夹下。您也可以通过修改--save_path参数自定义保存路径。
查看运行结果
{'input_path': '/root/.paddlex/predict_input/general_formula_recognition.png', 'layout_result': {'input_path': '/root/.paddlex/predict_input/general_formula_recognition.png', 'boxes': [{'cls_id': 3, 'label': 'number', 'score': 0.7580855488777161, 'coordinate': [1028.3635, 205.46213, 1038.953, 222.99033]}, {'cls_id': 0, 'label': 'paragraph_title', 'score': 0.8882032632827759, 'coordinate': [272.75305, 204.50894, 433.7473, 226.17996]}, {'cls_id': 2, 'label': 'text', 'score': 0.9685840606689453, 'coordinate': [272.75928, 282.17773, 1041.9316, 374.44687]}, {'cls_id': 2, 'label': 'text', 'score': 0.9559416770935059, 'coordinate': [272.39056, 385.54114, 1044.1521, 443.8598]}, {'cls_id': 2, 'label': 'text', 'score': 0.9610629081726074, 'coordinate': [272.40817, 467.2738, 1045.1033, 563.4855]}, {'cls_id': 7, 'label': 'formula', 'score': 0.8916195034980774, 'coordinate': [503.45743, 594.6236, 1040.6804, 619.73895]}, {'cls_id': 2, 'label': 'text', 'score': 0.973675549030304, 'coordinate': [272.32007, 648.8599, 1040.8702, 775.15686]}, {'cls_id': 7, 'label': 'formula', 'score': 0.9038916230201721, 'coordinate': [554.2307, 803.5825, 1040.4657, 855.3159]}, {'cls_id': 2, 'label': 'text', 'score': 0.9025381803512573, 'coordinate': [272.535, 875.1402, 573.1086, 898.3587]}, {'cls_id': 2, 'label': 'text', 'score': 0.8336610794067383, 'coordinate': [317.48013, 909.60864, 966.8498, 933.7868]}, {'cls_id': 2, 'label': 'text', 'score': 0.8779091238975525, 'coordinate': [19.704018, 653.322, 72.433235, 1215.1992]}, {'cls_id': 2, 'label': 'text', 'score': 0.8832409977912903, 'coordinate': [272.13028, 958.50806, 1039.7928, 1019.476]}, {'cls_id': 7, 'label': 'formula', 'score': 0.9088466167449951, 'coordinate': [517.1226, 1042.3978, 1040.2208, 1095.7457]}, {'cls_id': 2, 'label': 'text', 'score': 0.9587949514389038, 'coordinate': [272.03336, 1112.9269, 1041.0201, 1206.8417]}, {'cls_id': 2, 'label': 'text', 'score': 0.8885666131973267, 'coordinate': [271.7495, 1231.8752, 710.44495, 1255.7981]}, {'cls_id': 7, 'label': 'formula', 'score': 0.8907185196876526, 'coordinate': [581.2295, 1287.4525, 1039.8014, 1312.772]}, {'cls_id': 2, 'label': 'text', 'score': 0.9559596180915833, 'coordinate': [273.1827, 1341.421, 1041.0299, 1401.7255]}, {'cls_id': 2, 'label': 'text', 'score': 0.875311553478241, 'coordinate': [272.8338, 1427.3711, 789.7108, 1451.1359]}, {'cls_id': 7, 'label': 'formula', 'score': 0.9152213931083679, 'coordinate': [524.9582, 1474.8136, 1041.6333, 1530.7142]}, {'cls_id': 2, 'label': 'text', 'score': 0.9584835767745972, 'coordinate': [272.81665, 1549.524, 1042.9962, 1608.7157]}]}, 'ocr_result': {}, 'table_result': [], 'dt_polys': [array([[ 503.45743, 594.6236 ],
[1040.6804 , 594.6236 ],
[1040.6804 , 619.73895],
[ 503.45743, 619.73895]], dtype=float32), array([[ 554.2307, 803.5825],
[1040.4657, 803.5825],
[1040.4657, 855.3159],
[ 554.2307, 855.3159]], dtype=float32), array([[ 517.1226, 1042.3978],
[1040.2208, 1042.3978],
[1040.2208, 1095.7457],
[ 517.1226, 1095.7457]], dtype=float32), array([[ 581.2295, 1287.4525],
[1039.8014, 1287.4525],
[1039.8014, 1312.772 ],
[ 581.2295, 1312.772 ]], dtype=float32), array([[ 524.9582, 1474.8136],
[1041.6333, 1474.8136],
[1041.6333, 1530.7142],
[ 524.9582, 1530.7142]], dtype=float32)], 'rec_formula': ['F({\bf x})=C(F_{1}(x_{1}),\cdot\cdot\cdot,F_{N}(x_{N})).\qquad\qquad\qquad(1)', 'p(\mathbf{x})=c(\mathbf{u})\prod_{i}p(x_{i}).\qquad\qquad\qquad\qquad\qquad\quad\quad~~\quad~~~~~~~~~~~~~~~(2)', 'H_{c}({\bf x})=-\int_{{\bf{u}}}c({\bf{u}})\log c({\bf{u}})d{\bf{u}}.~~~~~~~~~~~~~~~~~~~~~(3)', 'I({\bf x})=-H_{c}({\bf x}).\qquad\qquad\qquad\qquad(4)', 'H({\bf x})=\sum_{i}H(x_{i})+H_{c}({\bf x}).\eqno\qquad\qquad\qquad(5)']}
paddlex --pipeline seal_recognition --input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/seal_text_det.png --device gpu:0 --save_path output
- 运行后,输出结果及可视化图片将被保存在
output文件夹下。您也可以通过修改--save_path参数自定义保存路径。
查看运行结果
{'input_path': PosixPath('/root/.paddlex/temp/tmpa8eqnpus.png'), 'layout_result': {'input_path': PosixPath('/root/.paddlex/temp/tmpa8eqnpus.png'), 'boxes': [{'cls_id': 2, 'label': 'seal', 'score': 0.9813321828842163, 'coordinate': [0, 5.1820183, 639.59314, 637.7533]}]}, 'ocr_result': {'dt_polys': [array([[166, 468],
[206, 503],
[249, 523],
[312, 535],
[364, 529],
[390, 521],
[428, 505],
[465, 476],
[468, 474],
[473, 474],
[476, 475],
[478, 477],
[508, 507],
[510, 510],
[511, 514],
[509, 518],
[507, 521],
[458, 559],
[455, 560],
[399, 584],
[399, 584],
[369, 591],
[367, 592],
[308, 597],
[305, 596],
[240, 584],
[239, 584],
[220, 577],
[169, 552],
[166, 551],
[120, 510],
[117, 507],
[116, 503],
[117, 499],
[121, 495],
[153, 468],
[156, 467],
[161, 467]]), array([[439, 444],
[443, 444],
[446, 446],
[448, 448],
[450, 451],
[450, 454],
[448, 498],
[448, 502],
[445, 505],
[442, 507],
[439, 507],
[399, 505],
[196, 506],
[192, 505],
[189, 503],
[187, 500],
[187, 497],
[186, 458],
[186, 456],
[187, 451],
[188, 448],
[192, 444],
[194, 444],
[198, 443]]), array([[463, 347],
[468, 347],
[472, 350],
[474, 353],
[476, 360],
[477, 425],
[476, 429],
[474, 433],
[470, 436],
[466, 438],
[463, 438],
[175, 439],
[170, 438],
[166, 435],
[163, 432],
[161, 426],
[161, 361],
[161, 356],
[163, 352],
[167, 349],
[172, 347],
[184, 346],
[186, 346]]), array([[325, 38],
[485, 91],
[489, 94],
[493, 96],
[587, 225],
[588, 230],
[589, 234],
[592, 384],
[591, 389],
[588, 393],
[585, 397],
[581, 399],
[576, 399],
[572, 398],
[508, 380],
[503, 379],
[499, 375],
[498, 370],
[497, 367],
[493, 258],
[428, 171],
[421, 165],
[323, 136],
[225, 165],
[207, 175],
[144, 260],
[141, 365],
[141, 370],
[138, 374],
[134, 378],
[131, 379],
[ 66, 398],
[ 61, 398],
[ 56, 398],
[ 52, 395],
[ 48, 391],
[ 47, 386],
[ 47, 384],
[ 47, 235],
[ 48, 230],
[ 50, 226],
[146, 96],
[151, 92],
[154, 91],
[315, 38],
[320, 37]])], 'dt_scores': [0.99375725701319, 0.9871711582010613, 0.9937523531067023, 0.9911629231838204], 'rec_text': ['5263647368706', '吗繁物', '发票专天津君和缘商贸有限公司'], 'rec_score': [0.9933745265007019, 0.998288631439209, 0.9999362230300903, 0.9923253655433655], 'input_path': PosixPath('/Users/chenghong0temp/tmpa8eqnpus.png')}, 'src_file_name': 'https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/seal_text_det.png', 'page_id': 0}

计算机视觉相关产线命令行使用
paddlex --pipeline image_classification --input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/general_image_classification_001.jpg --device gpu:0 --save_path output
- 运行后,输出结果及可视化图片将被保存在
output文件夹下。您也可以通过修改--save_path参数自定义保存路径。
查看运行结果
{'input_path': '/root/.paddlex/predict_input/general_image_classification_001.jpg', 'class_ids': [296, 170, 356, 258, 248], 'scores': [0.62736, 0.03752, 0.03256, 0.0323, 0.03194], 'label_names': ['ice bear, polar bear, Ursus Maritimus, Thalarctos maritimus', 'Irish wolfhound', 'weasel', 'Samoyed, Samoyede', 'Eskimo dog, husky']}

paddlex --pipeline object_detection --input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/general_object_detection_002.png --device gpu:0 --save_path output
- 运行后,输出结果及可视化图片将被保存在
output文件夹下。您也可以通过修改--save_path参数自定义保存路径。
查看运行结果
{'input_path': '/root/.paddlex/predict_input/general_object_detection_002.png', 'boxes': [{'cls_id': 49, 'label': 'orange', 'score': 0.8188097476959229, 'coordinate': [661, 93, 870, 305]}, {'cls_id': 47, 'label': 'apple', 'score': 0.7743489146232605, 'coordinate': [76, 274, 330, 520]}, {'cls_id': 47, 'label': 'apple', 'score': 0.7270504236221313, 'coordinate': [285, 94, 469, 297]}, {'cls_id': 46, 'label': 'banana', 'score': 0.5570532083511353, 'coordinate': [310, 361, 685, 712]}, {'cls_id': 47, 'label': 'apple', 'score': 0.5484835505485535, 'coordinate': [764, 285, 924, 440]}, {'cls_id': 47, 'label': 'apple', 'score': 0.5160726308822632, 'coordinate': [853, 169, 987, 303]}, {'cls_id': 60, 'label': 'dining table', 'score': 0.5142655968666077, 'coordinate': [0, 0, 1072, 720]}, {'cls_id': 47, 'label': 'apple', 'score': 0.5101479291915894, 'coordinate': [57, 23, 213, 176]}]}

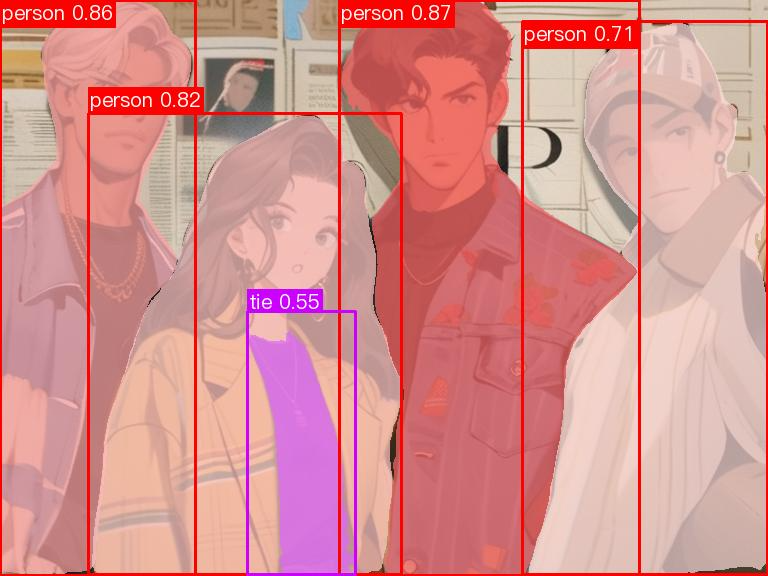
paddlex --pipeline instance_segmentation --input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/general_instance_segmentation_004.png --device gpu:0 --save_path output
- 运行后,输出结果及可视化图片将被保存在
output文件夹下。您也可以通过修改--save_path参数自定义保存路径。
查看运行结果
{'input_path': '/root/.paddlex/predict_input/general_instance_segmentation_004.png', 'boxes': [{'cls_id': 0, 'label': 'person', 'score': 0.8698326945304871, 'coordinate': [339, 0, 639, 575]}, {'cls_id': 0, 'label': 'person', 'score': 0.8571141362190247, 'coordinate': [0, 0, 195, 575]}, {'cls_id': 0, 'label': 'person', 'score': 0.8202633857727051, 'coordinate': [88, 113, 401, 574]}, {'cls_id': 0, 'label': 'person', 'score': 0.7108577489852905, 'coordinate': [522, 21, 767, 574]}, {'cls_id': 27, 'label': 'tie', 'score': 0.554280698299408, 'coordinate': [247, 311, 355, 574]}]}
paddlex --pipeline semantic_segmentation --input https://paddle-model-ecology.bj.bcebos.com/paddlex/PaddleX3.0/application/semantic_segmentation/makassaridn-road_demo.png --device gpu:0 --save_path output
- 运行后,输出结果及可视化图片将被保存在
output文件夹下。您也可以通过修改--save_path参数自定义保存路径。

paddlex --pipeline multi_label_image_classification --input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/general_image_classification_001.jpg --device gpu:0 --save_path output
- 运行后,输出结果及可视化图片将被保存在
output文件夹下。您也可以通过修改--save_path参数自定义保存路径。

paddlex --pipeline small_object_detection --input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/small_object_detection.jpg --device gpu:0 --save_path output
- 运行后,输出结果及可视化图片将被保存在
output文件夹下。您也可以通过修改--save_path参数自定义保存路径。
查看运行结果
{'input_path': '/root/.paddlex/predict_input/small_object_detection.jpg', 'boxes': [{'cls_id': 3, 'label': 'car', 'score': 0.9243856072425842, 'coordinate': [624, 638, 682, 741]}, {'cls_id': 3, 'label': 'car', 'score': 0.9206348061561584, 'coordinate': [242, 561, 356, 613]}, {'cls_id': 3, 'label': 'car', 'score': 0.9194547533988953, 'coordinate': [670, 367, 705, 400]}, {'cls_id': 3, 'label': 'car', 'score': 0.9162291288375854, 'coordinate': [459, 259, 523, 283]}, {'cls_id': 4, 'label': 'van', 'score': 0.9075379371643066, 'coordinate': [467, 213, 498, 242]}, {'cls_id': 4, 'label': 'van', 'score': 0.9066920876502991, 'coordinate': [547, 351, 577, 397]}, {'cls_id': 3, 'label': 'car', 'score': 0.9041045308113098, 'coordinate': [502, 632, 562, 736]}, {'cls_id': 3, 'label': 'car', 'score': 0.8934890627861023, 'coordinate': [613, 383, 647, 427]}, {'cls_id': 3, 'label': 'car', 'score': 0.8803309202194214, 'coordinate': [640, 280, 671, 309]}, {'cls_id': 3, 'label': 'car', 'score': 0.8727016448974609, 'coordinate': [1199, 256, 1259, 281]}, {'cls_id': 3, 'label': 'car', 'score': 0.8705748915672302, 'coordinate': [534, 410, 570, 461]}, {'cls_id': 3, 'label': 'car', 'score': 0.8654043078422546, 'coordinate': [669, 248, 702, 271]}, {'cls_id': 3, 'label': 'car', 'score': 0.8555219769477844, 'coordinate': [525, 243, 550, 270]}, {'cls_id': 3, 'label': 'car', 'score': 0.8522038459777832, 'coordinate': [526, 220, 553, 243]}, {'cls_id': 3, 'label': 'car', 'score': 0.8392605185508728, 'coordinate': [557, 141, 575, 158]}, {'cls_id': 3, 'label': 'car', 'score': 0.8353804349899292, 'coordinate': [537, 120, 553, 133]}, {'cls_id': 3, 'label': 'car', 'score': 0.8322211503982544, 'coordinate': [585, 132, 603, 147]}, {'cls_id': 3, 'label': 'car', 'score': 0.8298957943916321, 'coordinate': [701, 283, 736, 313]}, {'cls_id': 3, 'label': 'car', 'score': 0.8217393159866333, 'coordinate': [885, 347, 943, 377]}, {'cls_id': 3, 'label': 'car', 'score': 0.820313572883606, 'coordinate': [493, 150, 511, 168]}, {'cls_id': 0, 'label': 'pedestrian', 'score': 0.8183429837226868, 'coordinate': [203, 701, 224, 743]}, {'cls_id': 0, 'label': 'pedestrian', 'score': 0.815082848072052, 'coordinate': [185, 710, 201, 744]}, {'cls_id': 6, 'label': 'tricycle', 'score': 0.7892289757728577, 'coordinate': [311, 371, 344, 407]}, {'cls_id': 6, 'label': 'tricycle', 'score': 0.7812919020652771, 'coordinate': [345, 380, 388, 405]}, {'cls_id': 0, 'label': 'pedestrian', 'score': 0.7748346328735352, 'coordinate': [295, 500, 309, 532]}, {'cls_id': 0, 'label': 'pedestrian', 'score': 0.7688500285148621, 'coordinate': [851, 436, 863, 466]}, {'cls_id': 3, 'label': 'car', 'score': 0.7466475367546082, 'coordinate': [565, 114, 580, 128]}, {'cls_id': 3, 'label': 'car', 'score': 0.7156463265419006, 'coordinate': [483, 66, 495, 78]}, {'cls_id': 3, 'label': 'car', 'score': 0.704211950302124, 'coordinate': [607, 138, 642, 152]}, {'cls_id': 3, 'label': 'car', 'score': 0.7021926045417786, 'coordinate': [505, 72, 518, 83]}, {'cls_id': 0, 'label': 'pedestrian', 'score': 0.6897469162940979, 'coordinate': [802, 460, 815, 488]}, {'cls_id': 3, 'label': 'car', 'score': 0.671891450881958, 'coordinate': [574, 123, 593, 136]}, {'cls_id': 9, 'label': 'motorcycle', 'score': 0.6712754368782043, 'coordinate': [445, 317, 472, 334]}, {'cls_id': 0, 'label': 'pedestrian', 'score': 0.6695684790611267, 'coordinate': [479, 309, 489, 332]}, {'cls_id': 3, 'label': 'car', 'score': 0.6273623704910278, 'coordinate': [654, 210, 677, 234]}, {'cls_id': 3, 'label': 'car', 'score': 0.6070230603218079, 'coordinate': [640, 166, 667, 185]}, {'cls_id': 3, 'label': 'car', 'score': 0.6064521670341492, 'coordinate': [461, 59, 476, 71]}, {'cls_id': 3, 'label': 'car', 'score': 0.5860581398010254, 'coordinate': [464, 87, 484, 100]}, {'cls_id': 9, 'label': 'motorcycle', 'score': 0.5792551636695862, 'coordinate': [390, 390, 419, 408]}, {'cls_id': 3, 'label': 'car', 'score': 0.5559225678443909, 'coordinate': [481, 125, 496, 140]}, {'cls_id': 0, 'label': 'pedestrian', 'score': 0.5531904697418213, 'coordinate': [869, 306, 880, 331]}, {'cls_id': 0, 'label': 'pedestrian', 'score': 0.5468509793281555, 'coordinate': [895, 294, 904, 319]}, {'cls_id': 3, 'label': 'car', 'score': 0.5451828241348267, 'coordinate': [505, 94, 518, 108]}, {'cls_id': 3, 'label': 'car', 'score': 0.5398445725440979, 'coordinate': [657, 188, 681, 208]}, {'cls_id': 4, 'label': 'van', 'score': 0.5318890810012817, 'coordinate': [518, 88, 534, 102]}, {'cls_id': 3, 'label': 'car', 'score': 0.5296525359153748, 'coordinate': [527, 71, 540, 81]}, {'cls_id': 6, 'label': 'tricycle', 'score': 0.5168400406837463, 'coordinate': [528, 320, 563, 346]}, {'cls_id': 3, 'label': 'car', 'score': 0.5088561177253723, 'coordinate': [511, 84, 530, 95]}, {'cls_id': 0, 'label': 'pedestrian', 'score': 0.502006471157074, 'coordinate': [841, 266, 850, 283]}]}

时序分析相关产线命令行使用
paddlex --pipeline ts_fc --input https://paddle-model-ecology.bj.bcebos.com/paddlex/ts/demo_ts/ts_fc.csv --device gpu:0 --save_path output
- 运行后,输出结果将被保存在
output文件夹下。您也可以通过修改--save_path参数自定义保存路径。
查看运行结果
{'input_path': 'ts_fc.csv', 'forecast': OT
date
2018-06-26 20:00:00 9.586131
2018-06-26 21:00:00 9.379762
2018-06-26 22:00:00 9.252275
2018-06-26 23:00:00 9.249993
2018-06-27 00:00:00 9.164998
... ...
2018-06-30 15:00:00 8.830340
2018-06-30 16:00:00 9.291553
2018-06-30 17:00:00 9.097666
2018-06-30 18:00:00 8.905430
2018-06-30 19:00:00 8.993793
[96 rows x 1 columns]}
📝 Python 脚本使用¶
几行代码即可完成产线的快速推理,统一的 Python 脚本格式如下:
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline=[产线名称])
output = pipeline.predict([输入图片名称])
for res in output:
res.print()
res.save_to_img("./output/")
res.save_to_json("./output/")
create_pipeline()实例化产线对象- 传入图片并调用产线对象的
predict方法进行推理预测 - 对预测结果进行处理
OCR相关产线Python脚本使用
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline="table_recognition")
output = pipeline.predict("table_recognition.jpg")
for res in output:
res.print() ## 打印预测的结构化输出
res.save_to_img("./output/") ## 保存img格式结果
res.save_to_xlsx("./output/") ## 保存表格格式结果
res.save_to_html("./output/") ## 保存html结果
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline="layout_parsing")
output = pipeline.predict("demo_paper.png")
for res in output:
res.print() ## 打印预测的结构化输出
res.save_to_img("./output/") ## 保存img格式结果
res.save_to_xlsx("./output/") ## 保存表格格式结果
res.save_to_html("./output/") ## 保存html结果
计算机视觉相关产线Python脚本使用
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline="multi_label_image_classification")
output = pipeline.predict("general_image_classification_001.jpg")
for res in output:
res.print() ## 打印预测的结构化输出
res.save_to_img("./output/") ## 保存结果可视化图像
res.save_to_json("./output/") ## 保存预测的结构化输出
时序分析相关产线Python脚本使用
🚀 详细教程¶
-
文档信息抽取
文档场景信息抽取v3(PP-ChatOCRv3)是飞桨特色的文档和图像智能分析解决方案,结合了 LLM 和 OCR 技术,一站式解决版面分析、生僻字、多页 pdf、表格、印章识别等常见的复杂文档信息抽取难点问题。
-
通用OCR
通用 OCR 产线用于解决文字识别任务,提取图片中的文字信息并以文本形式输出,基于端到端 OCR 串联系统,可实现 CPU 上毫秒级的文本内容精准预测,在通用场景上达到开源SOTA。
-
通用图像分类
图像分类能够自动提取图像特征并进行准确分类,可以识别各种物体,如动物、植物、交通标志等,广泛应用于物体识别、场景理解和自动标注等领域。
-
通用目标检测
目标检测旨在识别图像或视频中多个对象的类别及其位置,通过生成边界框来标记这些对象。该技术广泛应用于自动驾驶、监控系统和智能相册等领域。
-
小目标检测
小目标检测是一种专门识别图像中体积较小物体的技术,广泛应用于监控、无人驾驶和卫星图像分析等领域。它能够从复杂场景中准确找到并分类像行人、交通标志或小动物等小尺寸物体。
-
时序预测
时序预测是一种利用历史数据来预测未来趋势的技术,通过分析时间序列数据的变化模式。广泛应用于金融市场、天气预报和销售预测等领域。
💬 Discussion¶
我们非常欢迎并鼓励社区成员在 Discussions 板块中提出问题、分享想法和反馈。无论您是想要报告一个 bug、讨论一个功能请求、寻求帮助还是仅仅想要了解项目的最新动态,这里都是一个绝佳的平台。