Home
![]()
![]()
![]()
![]()
![]()
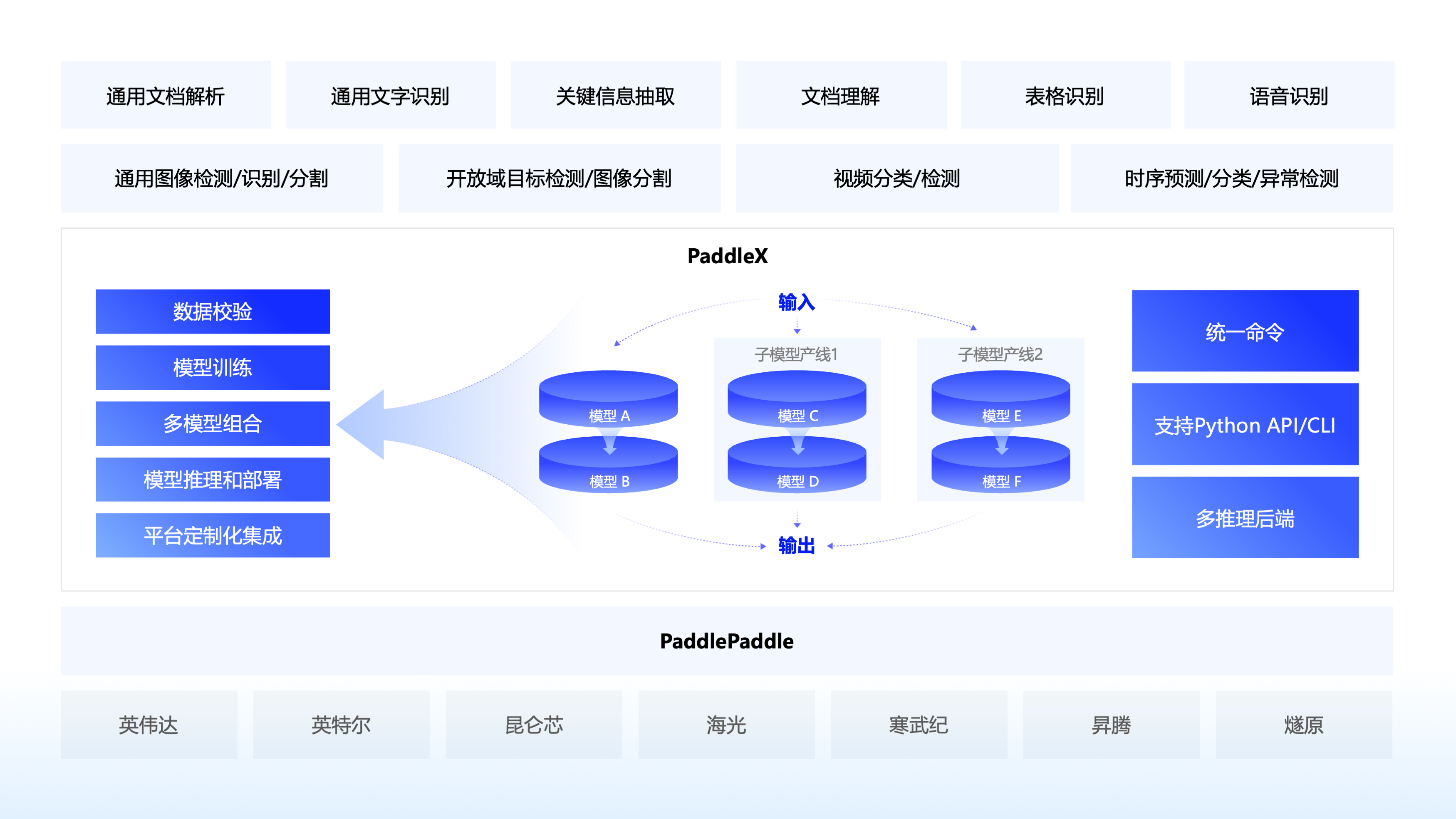
🔍 简介¶
PaddleX 3.0 是基于飞桨框架构建的低代码开发工具,它集成了众多开箱即用的预训练模型,可以实现模型从训练到推理的全流程开发,支持国内外多款主流硬件,助力AI 开发者进行产业实践。
🛠️ 安装¶
Warning
在安装 PaddleX 之前,请确保您已具备基本的 Python 运行环境(注:目前支持 Python 3.8 至 Python 3.13)。PaddleX 3.0-rc1 版本依赖的 PaddlePaddle 版本为 3.0.0以上版本。
安装 PaddlePaddle¶
Tip
无需关注物理机上的 CUDA 版本,只需关注显卡驱动程序版本。更多飞桨 Wheel 版本信息,请参考飞桨官网。
安装PaddleX¶
❗ 更多安装方式参考 PaddleX 安装教程
💻 命令行使用¶
一行命令即可快速体验产线效果,统一的命令行格式为:
PaddleX的每一条产线对应特定的参数,您可以在各自的产线文档中查看具体的参数说明。每条产线需指定必要的三个参数:
pipeline:产线名称或产线配置文件input:待处理的输入文件(如图片)的本地路径、目录或 URLdevice: 使用的硬件设备及序号(例如gpu:0表示使用第 0 块 GPU),也可选择使用 NPU(npu:0)、 XPU(xpu:0)、CPU(cpu)等
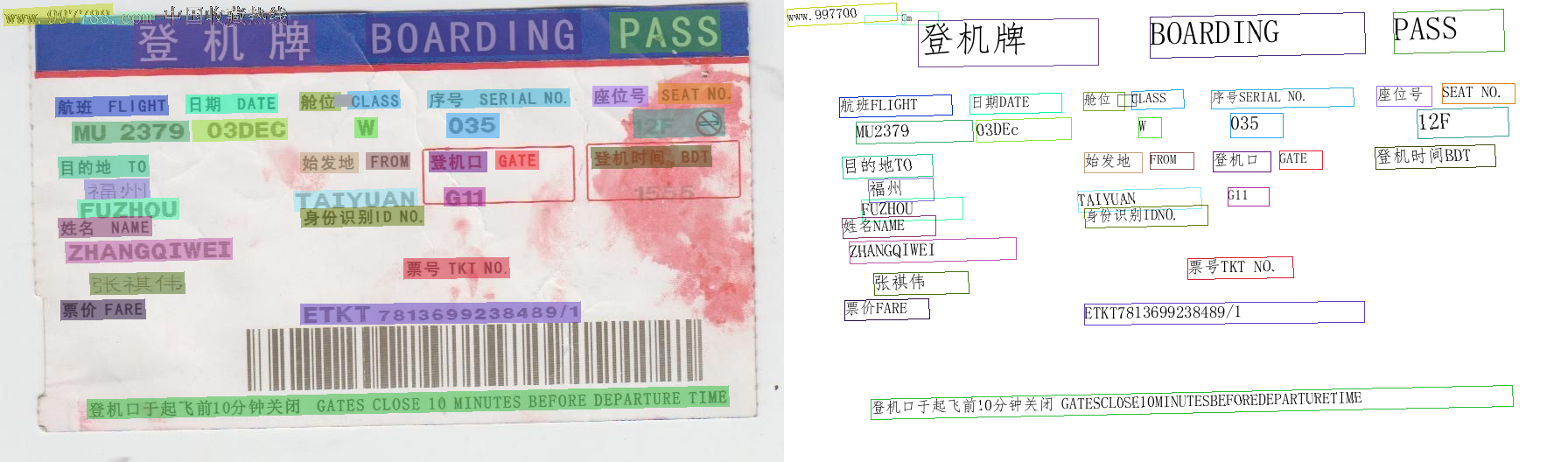
OCR相关产线命令行使用
paddlex --pipeline OCR \
--input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/general_ocr_002.png \
--use_doc_orientation_classify False \
--use_doc_unwarping False \
--use_textline_orientation False \
--save_path ./output \
--device gpu:0
查看运行结果
{'res': {'input_path': 'general_ocr_002.png', 'page_index': None, 'model_settings': {'use_doc_preprocessor': False, 'use_textline_orientation': False}, 'doc_preprocessor_res': {'input_path': None, 'model_settings': {'use_doc_orientation_classify': True, 'use_doc_unwarping': False}, 'angle': 0},'dt_polys': [array([[ 3, 10],[82, 10],[82, 33],[ 3, 33]], dtype=int16), ...], 'text_det_params': {'limit_side_len': 960, 'limit_type': 'max', 'thresh': 0.3, 'box_thresh': 0.6, 'unclip_ratio': 2.0}, 'text_type': 'general', 'textline_orientation_angles': [-1, ...], 'text_rec_score_thresh': 0.0, 'rec_texts': ['www.99*', ...], 'rec_scores': [0.8980069160461426, ...], 'rec_polys': [array([[ 3, 10],[82, 10],[82, 33],[ 3, 33]], dtype=int16), ...], 'rec_boxes': array([[ 3, 10, 82, 33], ...], dtype=int16)}}
paddlex --pipeline table_recognition \
--use_doc_orientation_classify=False \
--use_doc_unwarping=False \
--input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/table_recognition.jpg \
--save_path ./output \
--device gpu:0
查看运行结果
{'res': {'input_path': '/root/.paddlex/predict_input/table_recognition.jpg', 'page_index': None, 'model_settings': {'use_doc_preprocessor': False, 'use_layout_detection': True, 'use_ocr_model': True}, 'layout_det_res': {'input_path': None, 'page_index': None, 'boxes': [{'cls_id': 8, 'label': 'table', 'score': 0.9730289578437805, 'coordinate': [0.77032924, 0.0992564, 550.78864, 127.53717]}]}, 'overall_ocr_res': {'input_path': None, 'page_index': None, 'model_settings': {'use_doc_preprocessor': False, 'use_textline_orientation': False}, 'dt_polys': array([[[234, 6],
...,
[234, 25]],
...,
[[448, 101],
...,
[448, 121]]], dtype=int16), 'text_det_params': {'limit_side_len': 960, 'limit_type': 'max', 'thresh': 0.3, 'box_thresh': 0.6, 'unclip_ratio': 2.0}, 'text_type': 'general', 'textline_orientation_angles': array([-1, ..., -1]), 'text_rec_score_thresh': 0, 'rec_texts': ['CRuncover', 'Dres', '连续工作3', '取出来放在网上', '没想', '江、整江等八大', 'Abstr', 'rSrivi', '$709.', 'cludingGiv', '2.72', 'Ingcubic', '$744.78'], 'rec_scores': array([0.99612021, ..., 0.99815977]), 'rec_polys': array([[[234, 6],
...,
[234, 25]],
...,
[[448, 101],
...,
[448, 121]]], dtype=int16), 'rec_boxes': array([[234, ..., 25],
...,
[448, ..., 121]], dtype=int16)}, 'table_res_list': [{'cell_box_list': array([[ 3.77032924, ..., 27.0992564 ],
...,
[403.77032924, ..., 125.0992564 ]]), 'pred_html': '<html><body><table><tr><td colspan="4">CRuncover</td></tr><tr><td>Dres</td><td>连续工作3</td><td>取出来放在网上 没想</td><td>江、整江等八大</td></tr><tr><td>Abstr</td><td></td><td>rSrivi</td><td>$709.</td></tr><tr><td>cludingGiv</td><td>2.72</td><td>Ingcubic</td><td>$744.78</td></tr></table></body></html>', 'table_ocr_pred': {'rec_polys': array([[[234, 6],
...,
[234, 25]],
...,
[[448, 101],
...,
[448, 121]]], dtype=int16), 'rec_texts': ['CRuncover', 'Dres', '连续工作3', '取出来放在网上', '没想', '江、整江等八大', 'Abstr', 'rSrivi', '$709.', 'cludingGiv', '2.72', 'Ingcubic', '$744.78'], 'rec_scores': array([0.99612021, ..., 0.99815977]), 'rec_boxes': array([[234, ..., 25],
...,
[448, ..., 121]], dtype=int16)}}]}}

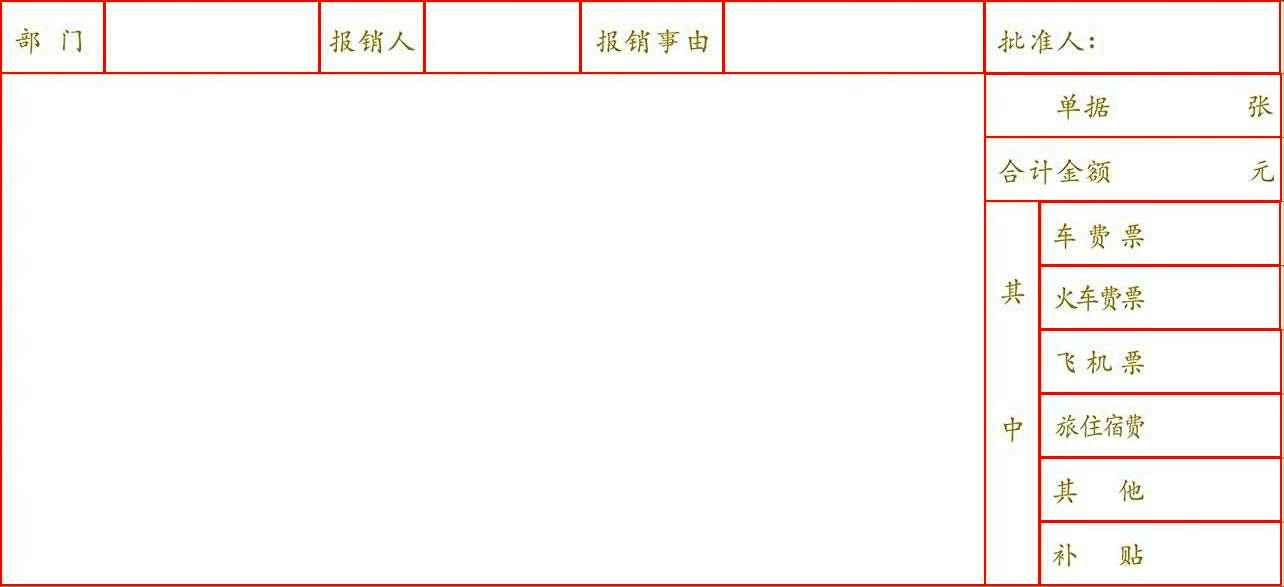
paddlex --pipeline table_recognition_v2 \
--use_doc_orientation_classify=False \
--use_doc_unwarping=False \
--input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/table_recognition_v2.jpg \
--save_path ./output \
--device gpu:0
查看运行结果
{'res': {'input_path': 'table_recognition_v2.jpg', 'page_index': None, 'model_settings': {'use_doc_preprocessor': False, 'use_layout_detection': True, 'use_ocr_model': True}, 'layout_det_res': {'input_path': None, 'page_index': None, 'boxes': [{'cls_id': 8, 'label': 'table', 'score': 0.86655592918396, 'coordinate': [0.0125130415, 0.41920784, 1281.3737, 585.3884]}]}, 'overall_ocr_res': {'input_path': None, 'page_index': None, 'model_settings': {'use_doc_preprocessor': False, 'use_textline_orientation': False}, 'dt_polys': array([[[ 9, 21],
...,
[ 9, 59]],
...,
[[1046, 536],
...,
[1046, 573]]], dtype=int16), 'text_det_params': {'limit_side_len': 960, 'limit_type': 'max', 'thresh': 0.3, 'box_thresh': 0.6, 'unclip_ratio': 2.0}, 'text_type': 'general', 'textline_orientation_angles': array([-1, ..., -1]), 'text_rec_score_thresh': 0, 'rec_texts': ['部门', '报销人', '报销事由', '批准人:', '单据', '张', '合计金额', '元', '车费票', '其', '火车费票', '飞机票', '中', '旅住宿费', '其他', '补贴'], 'rec_scores': array([0.99958128, ..., 0.99317062]), 'rec_polys': array([[[ 9, 21],
...,
[ 9, 59]],
...,
[[1046, 536],
...,
[1046, 573]]], dtype=int16), 'rec_boxes': array([[ 9, ..., 59],
...,
[1046, ..., 573]], dtype=int16)}, 'table_res_list': [{'cell_box_list': [array([ 0.13052222, ..., 73.08310249]), array([104.43082511, ..., 73.27777413]), array([319.39041221, ..., 73.30439308]), array([424.2436837 , ..., 73.44736794]), array([580.75836265, ..., 73.24003914]), array([723.04370201, ..., 73.22717598]), array([984.67315757, ..., 73.20420387]), array([1.25130415e-02, ..., 5.85419208e+02]), array([984.37072837, ..., 137.02281502]), array([984.26586998, ..., 201.22290352]), array([984.24017417, ..., 585.30775765]), array([1039.90606773, ..., 265.44664314]), array([1039.69549644, ..., 329.30540779]), array([1039.66546714, ..., 393.57319954]), array([1039.5122689 , ..., 457.74644783]), array([1039.55535972, ..., 521.73030403]), array([1039.58612144, ..., 585.09468392])], 'pred_html': '<html><body><table><tbody><tr><td>部门</td><td></td><td>报销人</td><td></td><td>报销事由</td><td></td><td colspan="2">批准人:</td></tr><tr><td colspan="6" rowspan="8"></td><td colspan="2">单据 张</td></tr><tr><td colspan="2">合计金额 元</td></tr><tr><td rowspan="6">其 中</td><td>车费票</td></tr><tr><td>火车费票</td></tr><tr><td>飞机票</td></tr><tr><td>旅住宿费</td></tr><tr><td>其他</td></tr><tr><td>补贴</td></tr></tbody></table></body></html>', 'table_ocr_pred': {'rec_polys': array([[[ 9, 21],
...,
[ 9, 59]],
...,
[[1046, 536],
...,
[1046, 573]]], dtype=int16), 'rec_texts': ['部门', '报销人', '报销事由', '批准人:', '单据', '张', '合计金额', '元', '车费票', '其', '火车费票', '飞机票', '中', '旅住宿费', '其他', '补贴'], 'rec_scores': array([0.99958128, ..., 0.99317062]), 'rec_boxes': array([[ 9, ..., 59],
...,
[1046, ..., 573]], dtype=int16)}}]}}
paddlex --pipeline layout_parsing \
--input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/layout_parsing_demo.png \
--use_doc_orientation_classify False \
--use_doc_unwarping False \
--use_textline_orientation False \
--save_path ./output \
--device gpu:0
查看运行结果
{'res': {'input_path': 'layout_parsing_demo.png', 'page_index': None, 'model_settings': {'use_doc_preprocessor': False, 'use_general_ocr': True, 'use_seal_recognition': True, 'use_table_recognition': True, 'use_formula_recognition': False}, 'parsing_res_list': [{'block_bbox': [133.36868, 40.128025, 1383.7496, 123.51852], 'block_label': 'text', 'block_content': '助力双方交往\n搭建友谊桥梁'}, {'block_bbox': [587.4096, 160.58267, 927.6319, 179.2817], 'block_label': 'figure_title', 'block_content': '本报记者沈小晓任彦黄培昭'}, {'block_bbox': [773.8337, 200.6484, 1505.5646, 687.1228], 'block_label': 'image', 'block_content': ''}, {'block_bbox': [390.39642, 201.85085, 741.43414, 292.60092], 'block_label': 'text', 'block_content': '厄立特里亚高等教育与研究院合作建立,开\n设了中国语言课程和中国文化课程,注册学\n生2万余人次。10余年来,厄特孔院已成为\n当地民众了解中国的一扇窗口。'}, {'block_bbox': [9.714512, 202.68811, 359.62323, 340.3127], 'block_label': 'text', 'block_content': '身着中国传统民族服装的厄立特里亚青\n年依次登台表演中国民族舞、现代舞、扇子舞\n等,曼妙的舞姿赢得现场观众阵阵掌声。这\n是日前厄立特里亚高等教育与研究院孔子学\n院(以下简称"厄特孔院"举办“喜迎新年"中国\n歌舞比赛的场景。'}, {'block_bbox': [390.74124, 298.42255, 740.8009, 436.79193], 'block_label': 'text', 'block_content': '黄鸣飞表示,随着来学习中文的人日益\n增多,阿斯马拉大学教学点已难以满足教学\n需要。2024年4月,由中企蜀道集团所属四\n川路桥承建的孔院教学楼项目在阿斯马拉开\n工建设,预计今年上半年峻工,建成后将为厄\n特孔院提供全新的办学场地。'}, {'block_bbox': [10.579921, 346.26508, 359.13733, 436.17682], 'block_label': 'text', 'block_content': '中国和厄立特里亚传统友谊深厚。近年\n来,在高质量共建“一带一路"框架下,中厄两\n国人文交流不断深化,互利合作的民意基础\n日益深厚。'}, {'block_bbox': [410.51892, 457.0816, 722.768, 516.78217], 'block_label': 'text', 'block_content': '“在中国学习的经历\n让我看到更广阔的世界”'}, {'block_bbox': [30.334734, 457.53757, 341.92758, 516.81995], 'block_label': 'paragraph_title', 'block_content': '“学好中文,我们的\n未来不是梦"'}, {'block_bbox': [390.89084, 538.1777, 742.1934, 604.6777], 'block_label': 'text', 'block_content': '多年来,厄立特里亚广大赴华留学生和\n培训人员积极投身国家建设,成为助力该国\n发展的人才和厄中友好的见证者和推动者。'}, {'block_bbox': [9.884378, 538.3683, 359.43878, 652.03644], 'block_label': 'text', 'block_content': '“鲜花曾告诉我你怎样走过,大地知道你\n心中的每一个角落……"厄立特里亚阿斯马拉\n大学综合楼二层,一阵优美的歌声在走廊里回\n响。循着熟悉的旋律轻轻推开一间教室的门,\n学生们正跟着老师学唱中文歌曲《同一首歌》。'}, {'block_bbox': [390.88583, 610.61304, 741.1856, 747.91656], 'block_label': 'text', 'block_content': '在厄立特里亚全国妇女联盟工作的约翰\n娜·特韦尔德·凯莱塔就是其中一位。她曾在\n中华女子学院攻读硕士学位,研究方向是女\n性领导力与社会发展。其间,她实地走访中国\n多个地区,获得了观察中国社会发展的第一\n手资料。'}, {'block_bbox': [10.115321, 658.7913, 359.40344, 771.3188], 'block_label': 'text', 'block_content': '这是厄特孔院阿斯马拉大学教学点的一\n节中文歌曲课。为了让学生们更好地理解歌\n词大意,老师尤斯拉·穆罕默德萨尔·侯赛因逐\n字翻译和解释歌词。随着伴奏声响起,学生们\n边唱边随着节拍摇动身体,现场气氛热烈。'}, {'block_bbox': [809.6597, 705.4076, 1485.5686, 747.42346], 'block_label': 'figure_title', 'block_content': '在厄立特里亚不久前举办的第六届中国风筝文化节上,当地小学生体验风筝制作。\n中国驻厄立特里亚大使馆供图'}, {'block_bbox': [389.62894, 753.4464, 742.0593, 890.9599], 'block_label': 'text', 'block_content': '谈起在中国求学的经历,约翰娜记忆犹\n新:“中国的发展在当今世界是独一无二的。\n沿着中国特色社会主义道路坚定前行,中国\n创造了发展奇迹,这一切都离不开中国共产党\n的领导。中国的发展经验值得许多国家学习\n借鉴。”'}, {'block_bbox': [9.867948, 777.38995, 360.40143, 843.43], 'block_label': 'text', 'block_content': '“这是中文歌曲初级班,共有32人。学\n生大部分来自首都阿斯马拉的中小学,年龄\n最小的仅有6岁。"尤斯拉告诉记者。'}, {'block_bbox': [9.780596, 850.09344, 359.62875, 1059.8483], 'block_label': 'text', 'block_content': '尤斯拉今年23岁,是厄立特里亚一所公立\n学校的艺术老师。她12岁开始在厄特孔院学\n习中文,在2017年第十届"汉语桥"世界中学生\n中文比赛中获得厄立特里亚赛区第一名,并和\n同伴代表厄立特里亚前往中国参加决赛,获得\n团体优胜奖。2022年起,尤斯拉开始在厄特孔\n院兼职教授中文歌曲,每周末两个课时。“中国\n文化博大精深,我希望我的学生们能够通过中\n文歌曲更好地理解中国文化。"她说。'}, {'block_bbox': [771.98157, 777.02783, 1124.4025, 1059.2194], 'block_label': 'text', 'block_content': '“不管远近都是客人,请不用客气;相约\n好了在一起,我们欢迎你…"在一场中厄青\n年联谊活动上,四川路桥中方员工同当地大\n学生合唱《北京欢迎你》。厄立特里亚技术学\n院计算机科学与工程专业学生鲁夫塔·谢拉\n是其中一名演唱者,她很早便在孔院学习中\n文,一直在为去中国留学作准备。“这句歌词\n是我们两国人民友谊的生动写照。无论是投\n身于厄立特里亚基础设施建设的中企员工,\n还是在中国留学的厄立特里亚学子,两国人\n民携手努力,必将推动两国关系不断向前发\n展。"鲁夫塔说。'}, {'block_bbox': [1155.9126, 777.7057, 1331.4768, 795.6466], 'block_label': 'text', 'block_content': '瓦的北红海省博物馆。'}, {'block_bbox': [1153.6993, 801.5608, 1504.5693, 987.6245], 'block_label': 'text', 'block_content': '博物馆二层陈列着一个发掘自阿杜利\n斯古城的中国古代陶制酒器,罐身上写着\n“万”“和"“禅"“山"等汉字。“这件文物证\n明,很早以前我们就通过海上丝绸之路进行\n贸易往来与文化交流。这也是厄立特里亚\n与中国友好交往历史的有力证明。"北红海\n省博物馆研究与文献部负责人伊萨亚斯·特\n斯法兹吉说。'}, {'block_bbox': [390.19556, 897.58984, 742.03076, 1035.8021], 'block_label': 'text', 'block_content': '正在西南大学学习的厄立特里亚博士生\n穆卢盖塔·泽穆伊对中国怀有深厚感情。8\n盖塔在社交媒体上写下这样一段话:“这是我\n人生的重要一步,自此我拥有了一双坚固的\n鞋子,赋予我穿越荆棘的力量。"'}, {'block_bbox': [1154.4485, 993.47705, 1503.8442, 1107.7343], 'block_label': 'text', 'block_content': '厄立特里亚国家博物馆考古学和人类学\n研究员菲尔蒙·特韦尔德十分喜爱中国文\n化。他表示:“学习彼此的语言和文化,将帮\n助厄中两国人民更好地理解彼此,助力双方\n交往,搭建友谊桥梁。"'}, {'block_bbox': [391.1788, 1041.2518, 740.86304, 1131.4594], 'block_label': 'text', 'block_content': '穆卢盖塔密切关注中国在经济、科技、教\n育等领域的发展,“中国在科研等方面的实力\n与日俱增。在中国学习的经历让我看到更广\n阔的世界,从中受益匪浅。”'}, {'block_bbox': [9.44888, 1065.2853, 360.20395, 1180.0414], 'block_label': 'text', 'block_content': '“姐姐,你想去中国吗?"“非常想!我想\n去看故宫、爬长城。"尤斯拉的学生中有一对\n能歌善舞的姐妹,姐姐露娅今年15岁,妹妹\n莉娅14岁,两人都已在厄特孔院学习多年,\n中文说得格外流利。'}, {'block_bbox': [771.5103, 1065.0969, 1123.4521, 1179.5637], 'block_label': 'text', 'block_content': '厄立特里亚高等教育委员会主任助理萨\n马瑞表示:“每年我们都会组织学生到中国访\n问学习,目前有超过5000名厄立特里亚学生\n在中国留学。学习中国的教育经验,有助于\n提升厄立特里亚的教育水平。"'}, {'block_bbox': [1153.9072, 1114.012, 1503.9468, 1347.0771], 'block_label': 'text', 'block_content': '厄立特里亚国家博物馆馆长塔吉丁·努\n里达姆·优素福曾多次访问中国,对中华文明\n的传承与创新、现代化博物馆的建设与发展\n印象深刻。“中国博物馆不仅有许多保存完好\n的文物,还充分运用先进科技手段进行展示,\n帮助人们更好理解中华文明。"塔吉丁说,“厄\n立特里亚与中国都拥有悠久的文明,始终相\n互理解、相互尊重。我希望未来与中国同行\n加强合作,共同向世界展示非洲和亚洲的灿\n烂文明。”'}, {'block_bbox': [390.84042, 1137.481, 741.0446, 1346.7771], 'block_label': 'text', 'block_content': '23岁的莉迪亚·埃斯蒂法诺斯已在厄特\n孔院学习3年,在中国书法、中国画等方面表\n现十分优秀,在2024年厄立特里亚赛区的\n“汉语桥"比赛中获得一等奖。莉迪亚说:“学\n习中国书法让我的内心变得安宁和纯粹。我\n也喜欢中国的服饰,希望未来能去中国学习,\n把中国不同民族元素融入服装设计中,创作\n出更多精美作品,也把厄特文化分享给更多\n的中国朋友。”'}, {'block_bbox': [8.636964, 1186.1119, 359.81888, 1299.478], 'block_label': 'text', 'block_content': '露娅对记者说:“这些年来,怀着对中文\n和中国文化的热爱,我们姐妹俩始终相互鼓\n励,一起学习。我们的中文一天比一天好,还\n学会了中文歌和中国舞。我们一定要到中国\n去。学好中文,我们的未来不是梦!”'}, {'block_bbox': [9.65557, 1305.0817, 359.62732, 1347.9409], 'block_label': 'text', 'block_content': '据厄特孔院中方院长黄鸣飞介绍,这所\n孔院成立于2013年3月,由贵州财经大学和'}, {'block_bbox': [791.91876, 1201.0499, 1104.4822, 1260.1809], 'block_label': 'text', 'block_content': '“共同向世界展示非\n洲和亚洲的灿烂文明”'}, {'block_bbox': [772.4803, 1281.0001, 1123.4064, 1348.0051], 'block_label': 'text', 'block_content': '从阿斯马拉出发,沿着蜿蜓曲折的盘山\n公路一路向东寻找丝路印迹。驱车两个小\n时,记者来到位于厄立特里亚港口城市马萨'}], 'layout_det_res': {'input_path': None, 'page_index': None, 'boxes': [{'cls_id': 1, 'label': 'image', 'score': 0.985334038734436, 'coordinate': [773.8337, 200.6484, 1505.5646, 687.1228]}, {'cls_id': 2, 'label': 'text', 'score': 0.9781306385993958, 'coordinate': [771.98157, 777.02783, 1124.4025, 1059.2194]}, {'cls_id': 2, 'label': 'text', 'score': 0.9772591590881348, 'coordinate': [1153.9072, 1114.012, 1503.9468, 1347.0771]}, {'cls_id': 2, 'label': 'text', 'score': 0.9764459133148193, 'coordinate': [390.74124, 298.42255, 740.8009, 436.79193]}, {'cls_id': 2, 'label': 'text', 'score': 0.9752683639526367, 'coordinate': [9.714512, 202.68811, 359.62323, 340.3127]}, {'cls_id': 2, 'label': 'text', 'score': 0.9751600027084351, 'coordinate': [1153.6993, 801.5608, 1504.5693, 987.6245]}, {'cls_id': 2, 'label': 'text', 'score': 0.9741775989532471, 'coordinate': [9.780596, 850.09344, 359.62875, 1059.8483]}, {'cls_id': 2, 'label': 'text', 'score': 0.9723023772239685, 'coordinate': [390.39642, 201.85085, 741.43414, 292.60092]}, {'cls_id': 2, 'label': 'text', 'score': 0.9717830419540405, 'coordinate': [390.84042, 1137.481, 741.0446, 1346.7771]}, {'cls_id': 2, 'label': 'text', 'score': 0.970496654510498, 'coordinate': [390.88583, 610.61304, 741.1856, 747.91656]}, {'cls_id': 2, 'label': 'text', 'score': 0.967951774597168, 'coordinate': [8.636964, 1186.1119, 359.81888, 1299.478]}, {'cls_id': 2, 'label': 'text', 'score': 0.9675101637840271, 'coordinate': [390.19556, 897.58984, 742.03076, 1035.8021]}, {'cls_id': 2, 'label': 'text', 'score': 0.9672409296035767, 'coordinate': [389.62894, 753.4464, 742.0593, 890.9599]}, {'cls_id': 2, 'label': 'text', 'score': 0.9657630324363708, 'coordinate': [10.579921, 346.26508, 359.13733, 436.17682]}, {'cls_id': 2, 'label': 'text', 'score': 0.9655840396881104, 'coordinate': [771.5103, 1065.0969, 1123.4521, 1179.5637]}, {'cls_id': 2, 'label': 'text', 'score': 0.9651231169700623, 'coordinate': [1154.4485, 993.47705, 1503.8442, 1107.7343]}, {'cls_id': 2, 'label': 'text', 'score': 0.9631907343864441, 'coordinate': [772.4803, 1281.0001, 1123.4064, 1348.0051]}, {'cls_id': 2, 'label': 'text', 'score': 0.9616568684577942, 'coordinate': [9.44888, 1065.2853, 360.20395, 1180.0414]}, {'cls_id': 2, 'label': 'text', 'score': 0.9596402645111084, 'coordinate': [10.115321, 658.7913, 359.40344, 771.3188]}, {'cls_id': 2, 'label': 'text', 'score': 0.9591165781021118, 'coordinate': [391.1788, 1041.2518, 740.86304, 1131.4594]}, {'cls_id': 2, 'label': 'text', 'score': 0.9564457535743713, 'coordinate': [9.884378, 538.3683, 359.43878, 652.03644]}, {'cls_id': 2, 'label': 'text', 'score': 0.9525545835494995, 'coordinate': [390.89084, 538.1777, 742.1934, 604.6777]}, {'cls_id': 2, 'label': 'text', 'score': 0.9493281245231628, 'coordinate': [9.867948, 777.38995, 360.40143, 843.43]}, {'cls_id': 2, 'label': 'text', 'score': 0.9400925040245056, 'coordinate': [9.65557, 1305.0817, 359.62732, 1347.9409]}, {'cls_id': 6, 'label': 'figure_title', 'score': 0.9255779385566711, 'coordinate': [809.6597, 705.4076, 1485.5686, 747.42346]}, {'cls_id': 2, 'label': 'text', 'score': 0.9046083688735962, 'coordinate': [1155.9126, 777.7057, 1331.4768, 795.6466]}, {'cls_id': 2, 'label': 'text', 'score': 0.8666954040527344, 'coordinate': [410.51892, 457.0816, 722.768, 516.78217]}, {'cls_id': 0, 'label': 'paragraph_title', 'score': 0.7959974408149719, 'coordinate': [30.334734, 457.53757, 341.92758, 516.81995]}, {'cls_id': 2, 'label': 'text', 'score': 0.7298153042793274, 'coordinate': [791.91876, 1201.0499, 1104.4822, 1260.1809]}, {'cls_id': 6, 'label': 'figure_title', 'score': 0.6074362397193909, 'coordinate': [587.4096, 160.58267, 927.6319, 179.2817]}, {'cls_id': 2, 'label': 'text', 'score': 0.584621012210846, 'coordinate': [133.36868, 40.128025, 1383.7496, 123.51852]}]}, 'overall_ocr_res': {'input_path': None, 'page_index': None, 'model_settings': {'use_doc_preprocessor': False, 'use_textline_orientation': False}, 'dt_polys': array([[[ 122, 28],
...,
[ 122, 135]],
...,
[[1156, 1330],
...,
[1156, 1351]]], dtype=int16), 'text_det_params': {'limit_side_len': 960, 'limit_type': 'max', 'thresh': 0.3, 'box_thresh': 0.6, 'unclip_ratio': 2.0}, 'text_type': 'general', 'textline_orientation_angles': array([-1, ..., -1]), 'text_rec_score_thresh': 0, 'rec_texts': ['助力双方交往', '搭建友谊桥梁', '西', '本报记者沈小晓任彦黄培昭', '身着中国传统民族服装的厄立特里亚青', '厄立特里亚高等教育与研究院合作建立,开', '年依次登台表演中国民族舞、现代舞、扇子舞', '设了中国语言课程和中国文化课程,注册学', '等,曼妙的舞姿赢得现场观众阵阵掌声。这', '生2万余人次。10余年来,厄特孔院已成为', '是日前厄立特里亚高等教育与研究院孔子学', '当地民众了解中国的一扇窗口。', '院(以下简称"厄特孔院"举办“喜迎新年"中国', '黄鸣飞表示,随着来学习中文的人日益', '歌舞比赛的场景。', '增多,阿斯马拉大学教学点已难以满足教学', '中国和厄立特里亚传统友谊深厚。近年', '需要。2024年4月,由中企蜀道集团所属四', '来,在高质量共建“一带一路"框架下,中厄两', '川路桥承建的孔院教学楼项目在阿斯马拉开', '国人文交流不断深化,互利合作的民意基础', '工建设,预计今年上半年峻工,建成后将为厄', '日益深厚。', '特孔院提供全新的办学场地。', '“学好中文,我们的', '“在中国学习的经历', '未来不是梦"', '让我看到更广阔的世界”', '“鲜花曾告诉我你怎样走过,大地知道你', '多年来,厄立特里亚广大赴华留学生和', '心中的每一个角落……"厄立特里亚阿斯马拉', '培训人员积极投身国家建设,成为助力该国', '大学综合楼二层,一阵优美的歌声在走廊里回', '发展的人才和厄中友好的见证者和推动者。', '响。循着熟悉的旋律轻轻推开一间教室的门,', '在厄立特里亚全国妇女联盟工作的约翰', '学生们正跟着老师学唱中文歌曲《同一首歌》。', '娜·特韦尔德·凯莱塔就是其中一位。她曾在', '这是厄特孔院阿斯马拉大学教学点的一', '中华女子学院攻读硕士学位,研究方向是女', '节中文歌曲课。为了让学生们更好地理解歌', '性领导力与社会发展。其间,她实地走访中国', '词大意,老师尤斯拉·穆罕默德萨尔·侯赛因逐', '多个地区,获得了观察中国社会发展的第一', '在厄立特里亚不久前举办的第六届中国风筝文化节上,当地小学生体验风筝制作。', '字翻译和解释歌词。随着伴奏声响起,学生们', '手资料。', '中国驻厄立特里亚大使馆供图', '边唱边随着节拍摇动身体,现场气氛热烈。', '谈起在中国求学的经历,约翰娜记忆犹', '“这是中文歌曲初级班,共有32人。学', '新:“中国的发展在当今世界是独一无二的。', '“不管远近都是客人,请不用客气;相约', '瓦的北红海省博物馆。', '生大部分来自首都阿斯马拉的中小学,年龄', '沿着中国特色社会主义道路坚定前行,中国', '好了在一起,我们欢迎你………"在一场中厄青', '博物馆二层陈列着一个发掘自阿杜利', '最小的仅有6岁。"尤斯拉告诉记者。', '创造了发展奇迹,这一切都离不开中国共产党', '年联谊活动上,四川路桥中方员工同当地大', '斯古城的中国古代陶制酒器,罐身上写着', '尤斯拉今年23岁,是厄立特里亚一所公立', '的领导。中国的发展经验值得许多国家学习', '学生合唱《北京欢迎你》。厄立特里亚技术学', '“万”“和”“禅”“山"等汉字。“这件文物证', '学校的艺术老师。她12岁开始在厄特孔院学', '借鉴。”', '院计算机科学与工程专业学生鲁夫塔·谢拉', '明,很早以前我们就通过海上丝绸之路进行', '习中文,在2017年第十届"汉语桥"世界中学生', '正在西南大学学习的厄立特里亚博士生', '是其中一名演唱者,她很早便在孔院学习中', '贸易往来与文化交流。这也是厄立特里亚', '中文比赛中获得厄立特里亚赛区第一名,并和', '穆卢盖塔·泽穆伊对中国怀有深厚感情。8', '文,一直在为去中国留学作准备。“这句歌词', '与中国友好交往历史的有力证明。"北红海', '同伴代表厄立特里亚前往中国参加决赛,获得', '是我们两国人民友谊的生动写照。无论是投', '省博物馆研究与文献部负责人伊萨亚斯·特', '团体优胜奖。2022年起,尤斯拉开始在厄特孔', '盖塔在社交媒体上写下这样一段话:“这是我', '身于厄立特里亚基础设施建设的中企员工,', '斯法兹吉说。', '院兼职教授中文歌曲,每周末两个课时。“中国', '人生的重要一步,自此我拥有了一双坚固的', '还是在中国留学的厄立特里亚学子,两国人', '厄立特里亚国家博物馆考古学和人类学', '文化博大精深,我希望我的学生们能够通过中', '鞋子,赋予我穿越荆棘的力量。"', '民携手努力,必将推动两国关系不断向前发', '研究员菲尔蒙·特韦尔德十分喜爱中国文', '文歌曲更好地理解中国文化。"她说。', '穆卢盖塔密切关注中国在经济、科技、教', '展。"鲁夫塔说。', '化。他表示:“学习彼此的语言和文化,将帮', '“姐姐,你想去中国吗?"“非常想!我想', '育等领域的发展,“中国在科研等方面的实力', '厄立特里亚高等教育委员会主任助理萨', '助厄中两国人民更好地理解彼此,助力双方', '去看故宫、爬长城。"尤斯拉的学生中有一对', '与日俱增。在中国学习的经历让我看到更广', '马瑞表示:“每年我们都会组织学生到中国访', '交往,搭建友谊桥梁。"', '能歌善舞的姐妹,姐姐露娅今年15岁,妹妹', '阔的世界,从中受益匪浅。”', '问学习,目前有超过5000名厄立特里亚学生', '厄立特里亚国家博物馆馆长塔吉丁·努', '莉娅14岁,两人都已在厄特孔院学习多年,', '23岁的莉迪亚·埃斯蒂法诺斯已在厄特', '在中国留学。学习中国的教育经验,有助于', '里达姆·优素福曾多次访问中国,对中华文明', '中文说得格外流利。', '孔院学习3年,在中国书法、中国画等方面表', '提升厄立特里亚的教育水平。"', '的传承与创新、现代化博物馆的建设与发展', '露娅对记者说:“这些年来,怀着对中文', '现十分优秀,在2024年厄立特里亚赛区的', '印象深刻。“中国博物馆不仅有许多保存完好', '“共同向世界展示非', '和中国文化的热爱,我们姐妹俩始终相互鼓', '“汉语桥"比赛中获得一等奖。莉迪亚说:“学', '的文物,还充分运用先进科技手段进行展示,', '励,一起学习。我们的中文一天比一天好,还', '习中国书法让我的内心变得安宁和纯粹。我', '洲和亚洲的灿烂文明”', '帮助人们更好理解中华文明。"塔吉丁说,“厄', '学会了中文歌和中国舞。我们一定要到中国', '也喜欢中国的服饰,希望未来能去中国学习,', '立特里亚与中国都拥有悠久的文明,始终相', '去。学好中文,我们的未来不是梦!”', '把中国不同民族元素融入服装设计中,创作', '从阿斯马拉出发,沿着蜿蜓曲折的盘山', '互理解、相互尊重。我希望未来与中国同行', '据厄特孔院中方院长黄鸣飞介绍,这所', '出更多精美作品,也把厄特文化分享给更多', '公路一路向东寻找丝路印迹。驱车两个小', '加强合作,共同向世界展示非洲和亚洲的灿', '孔院成立于2013年3月,由贵州财经大学和', '的中国朋友。”', '时,记者来到位于厄立特里亚港口城市马萨', '烂文明。”'], 'rec_scores': array([0.99982357, ..., 0.93637466]), 'rec_polys': array([[[ 122, 28],
...,
[ 122, 135]],
...,
[[1156, 1330],
...,
[1156, 1351]]], dtype=int16), 'rec_boxes': array([[ 122, ..., 135],
...,
[1156, ..., 1351]], dtype=int16)}}}
paddlex --pipeline PP-StructureV3 \
--input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/pp_structure_v3_demo.png \
--use_doc_orientation_classify False \
--use_doc_unwarping False \
--use_textline_orientation False \
--save_path ./output \
--device gpu:0
查看运行结果
{'res': {'input_path': 'pp_structure_v3_demo.png', 'page_index': None, 'model_settings': {'use_doc_preprocessor': False, 'use_general_ocr': True, 'use_seal_recognition': True, 'use_table_recognition': True, 'use_formula_recognition': True}, 'layout_det_res': {'input_path': None, 'page_index': None, 'boxes': [{'cls_id': 2, 'label': 'text', 'score': 0.9853514432907104, 'coordinate': [770.9531, 776.6814, 1122.6057, 1058.7322]}, {'cls_id': 1, 'label': 'image', 'score': 0.9848673939704895, 'coordinate': [775.7434, 202.27979, 1502.8113, 686.02136]}, {'cls_id': 2, 'label': 'text', 'score': 0.983731746673584, 'coordinate': [1152.3197, 1113.3275, 1503.3029, 1346.586]}, {'cls_id': 2, 'label': 'text', 'score': 0.9832221865653992, 'coordinate': [1152.5602, 801.431, 1503.8436, 986.3563]}, {'cls_id': 2, 'label': 'text', 'score': 0.9829439520835876, 'coordinate': [9.549545, 849.5713, 359.1173, 1058.7488]}, {'cls_id': 2, 'label': 'text', 'score': 0.9811657667160034, 'coordinate': [389.58298, 1137.2659, 740.66235, 1346.7488]}, {'cls_id': 2, 'label': 'text', 'score': 0.9775941371917725, 'coordinate': [9.1302185, 201.85, 359.0409, 339.05692]}, {'cls_id': 2, 'label': 'text', 'score': 0.9750366806983948, 'coordinate': [389.71454, 752.96924, 740.544, 889.92456]}, {'cls_id': 2, 'label': 'text', 'score': 0.9738152027130127, 'coordinate': [389.94565, 298.55988, 740.5585, 435.5124]}, {'cls_id': 2, 'label': 'text', 'score': 0.9737328290939331, 'coordinate': [771.50256, 1065.4697, 1122.2582, 1178.7324]}, {'cls_id': 2, 'label': 'text', 'score': 0.9728517532348633, 'coordinate': [1152.5154, 993.3312, 1503.2349, 1106.327]}, {'cls_id': 2, 'label': 'text', 'score': 0.9725610017776489, 'coordinate': [9.372787, 1185.823, 359.31738, 1298.7227]}, {'cls_id': 2, 'label': 'text', 'score': 0.9724331498146057, 'coordinate': [389.62848, 610.7389, 740.83234, 746.2377]}, {'cls_id': 2, 'label': 'text', 'score': 0.9720287322998047, 'coordinate': [389.29898, 897.0936, 741.41516, 1034.6616]}, {'cls_id': 2, 'label': 'text', 'score': 0.9713053703308105, 'coordinate': [10.323685, 1065.4663, 359.6786, 1178.8872]}, {'cls_id': 2, 'label': 'text', 'score': 0.9689728021621704, 'coordinate': [9.336395, 537.6609, 359.2901, 652.1881]}, {'cls_id': 2, 'label': 'text', 'score': 0.9684857130050659, 'coordinate': [10.7608185, 345.95068, 358.93616, 434.64087]}, {'cls_id': 2, 'label': 'text', 'score': 0.9681928753852844, 'coordinate': [9.674866, 658.89075, 359.56528, 770.4319]}, {'cls_id': 2, 'label': 'text', 'score': 0.9634978175163269, 'coordinate': [770.9464, 1281.1785, 1122.6522, 1346.7156]}, {'cls_id': 2, 'label': 'text', 'score': 0.96304851770401, 'coordinate': [390.0113, 201.28055, 740.1684, 291.53073]}, {'cls_id': 2, 'label': 'text', 'score': 0.962053120136261, 'coordinate': [391.21393, 1040.952, 740.5046, 1130.32]}, {'cls_id': 2, 'label': 'text', 'score': 0.9565253853797913, 'coordinate': [10.113251, 777.1482, 359.439, 842.437]}, {'cls_id': 2, 'label': 'text', 'score': 0.9497362375259399, 'coordinate': [390.31357, 537.86285, 740.47595, 603.9285]}, {'cls_id': 2, 'label': 'text', 'score': 0.9371236562728882, 'coordinate': [10.2034, 1305.9753, 359.5958, 1346.7295]}, {'cls_id': 0, 'label': 'paragraph_title', 'score': 0.9338151216506958, 'coordinate': [791.6062, 1200.8479, 1103.3257, 1259.9324]}, {'cls_id': 0, 'label': 'paragraph_title', 'score': 0.9326773285865784, 'coordinate': [408.0737, 457.37024, 718.9509, 516.63464]}, {'cls_id': 0, 'label': 'paragraph_title', 'score': 0.9274250864982605, 'coordinate': [29.448685, 456.6762, 340.99194, 515.6999]}, {'cls_id': 2, 'label': 'text', 'score': 0.8742568492889404, 'coordinate': [1154.7095, 777.3624, 1330.3086, 794.5853]}, {'cls_id': 2, 'label': 'text', 'score': 0.8442489504814148, 'coordinate': [586.49316, 160.15454, 927.468, 179.64203]}, {'cls_id': 11, 'label': 'doc_title', 'score': 0.8332607746124268, 'coordinate': [133.80017, 37.41908, 1380.8601, 124.1429]}, {'cls_id': 6, 'label': 'figure_title', 'score': 0.6770150661468506, 'coordinate': [812.1718, 705.1199, 1484.6973, 747.1692]}]}, 'overall_ocr_res': {'input_path': None, 'page_index': None, 'model_settings': {'use_doc_preprocessor': False, 'use_textline_orientation': False}, 'dt_polys': array([[[133, 35],
...,
[133, 131]],
...,
[[ 13, 754],
...,
[ 13, 777]]], dtype=int16), 'text_det_params': {'limit_side_len': 960, 'limit_type': 'max', 'thresh': 0.3, 'box_thresh': 0.6, 'unclip_ratio': 2.0}, 'text_type': 'general', 'textline_orientation_angles': array([-1, ..., -1]), 'text_rec_score_thresh': 0.0, 'rec_texts': ['助力双方交往', '搭建友谊桥梁', '本报记者', '沈小晓', '任', '彦', '黄培昭', '身着中国传统民族服装的厄立特里亚青', '厄立特里亚高等教育与研究院合作建立,开', '年依次登台表演中国民族舞、现代舞、扇子舞', '设了中国语言课程和中国文化课程,注册学', '等,曼妙的舞姿赢得现场观众阵阵掌声。这', '生2万余人次。10余年来,厄特孔院已成为', '是日前厄立特里亚高等教育与研究院孔子学', '当地民众了解中国的一扇窗口。', '院(以下简称"厄特孔院")举办"喜迎新年"中国', '黄鸣飞表示,随着来学习中文的人日益', '歌舞比赛的场景。', '增多,阿斯马拉大学教学点已难以满足教学', '中国和厄立特里亚传统友谊深厚。近年', '需要。2024年4月,由中企蜀道集团所属四', '来,在高质量共建"一带一路"框架下,中厄两', '川路桥承建的孔院教学楼项目在阿斯马拉开', '国人文交流不断深化,互利合作的民意基础', '工建设,预计今年上半年竣工,建成后将为厄', '日益深厚。', '特孔院提供全新的办学场地。', '“学好中文,我们的', '“在中国学习的经历', '未来不是梦”', '让我看到更广阔的世界”', '多年来,厄立特里亚广大赴华留学生和', '培训人员积极投身国家建设,成为助力该国', '发展的人才和厄中友好的见证者和推动者。', '在厄立特里亚全国妇女联盟工作的约翰', '娜·特韦尔德·凯莱塔就是其中一位。她曾在', '中华女子学院攻读硕士学位,研究方向是女', '性领导力与社会发展。其间,她实地走访中国', '多个地区,获得了观察中国社会发展的第一', '在厄立特里亚不久前举办的第六届中国风筝文化节上,当地小学生体验风筝制作。', '手资料。', '中国驻厄立特里亚大使馆供图', '“这是中文歌曲初级班,共有32人。学', '“不管远近都是客人,请不用客气;相约', '瓦的北红海省博物馆。', '生大部分来自首都阿斯马拉的中小学,年龄', '好了在一起,我们欢迎你"在一场中厄青', '博物馆二层陈列着一个发掘自阿杜利', '最小的仅有6岁。"尤斯拉告诉记者。', '年联谊活动上,四川路桥中方员工同当地大', '斯古城的中国古代陶制酒器,罐身上写着', '尤斯拉今年23岁,是厄立特里亚一所公立', '学生合唱《北京欢迎你》。厄立特里亚技术学', '“万”“和""禅”“山"等汉字。“这件文物证', '学校的艺术老师。她12岁开始在厄特孔院学', '院计算机科学与工程专业学生鲁夫塔·谢拉', '明,很早以前我们就通过海上丝绸之路进行', '习中文,在2017年第十届"汉语桥"世界中学生', '是其中一名演唱者,她很早便在孔院学习中', '贸易往来与文化交流。这也是厄立特里亚', '中文比赛中获得厄立特里亚赛区第一名,并和', '文,一直在为去中国留学作准备。“这句歌词', '与中国友好交往历史的有力证明。"北红海', '同伴代表厄立特里亚前往中国参加决赛,获得', '是我们两国人民友谊的生动写照。无论是投', '省博物馆研究与文献部负责人伊萨亚斯·特', '团体优胜奖。2022年起,尤斯拉开始在厄特孔', '身于厄立特里亚基础设施建设的中企员工,', '斯法兹吉说。', '院兼职教授中文歌曲,每周末两个课时。中国', '还是在中国留学的厄立特里亚学子,两国人', '厄立特里亚国家博物馆考古学和人类学', '文化博大精深,我希望我的学生们能够通过中', '民携手努力,必将推动两国关系不断向前发', '研究员菲尔蒙·特韦尔德十分喜爱中国文', '文歌曲更好地理解中国文化。"她说。', '穆卢盖塔密切关注中国在经济、科技、教', '展。"鲁夫塔说。', '化。他表示:“学习彼此的语言和文化,将帮', '“姐姐,你想去中国吗?"“非常想!我想', '育等领域的发展,“中国在科研等方面的实力', '厄立特里亚高等教育委员会主任助理萨', '助厄中两国人民更好地理解彼此,助力双方', '去看故宫、爬长城。"尤斯拉的学生中有一对', '与日俱增。在中国学习的经历让我看到更广', '马瑞表示:“每年我们都会组织学生到中国访', '交往,搭建友谊桥梁。"', '能歌善舞的姐妹,姐姐露娅今年15岁,妹妹', '阔的世界,从中受益匪浅。', '问学习,目前有超过5000名厄立特里亚学生', '厄立特里亚国家博物馆馆长塔吉丁·努', '莉娅14岁,两人都已在厄特孔院学习多年,', '23岁的莉迪亚·埃斯蒂法诺斯已在厄特', '在中国留学。学习中国的教育经验,有助于', '里达姆·优素福曾多次访问中国,对中华文明', '中文说得格外流利。', '孔院学习3年,在中国书法、中国画等方面表', '提升厄立特里亚的教育水平。”', '的传承与创新、现代化博物馆的建设与发展', '露娅对记者说:“这些年来,怀着对中文', '现十分优秀,在2024年厄立特里亚赛区的', '“共同向世界展示非', '印象深刻。“中国博物馆不仅有许多保存完好', '和中国文化的热爱,我们姐妹俩始终相互鼓', '“汉语桥"比赛中获得一等奖。莉迪亚说:“学', '的文物,还充分运用先进科技手段进行展示,', '励,一起学习。我们的中文一天比一天好,还', '习中国书法让我的内心变得安宁和纯粹。我', '洲和亚洲的灿烂文明”', '帮助人们更好理解中华文明。"塔吉丁说,厄', '学会了中文歌和中国舞。我们一定要到中国', '也喜欢中国的服饰,希望未来能去中国学习,', '立特里亚与中国都拥有悠久的文明,始终相', '去。学好中文,我们的未来不是梦!"', '把中国不同民族元素融入服装设计中,创作', '从阿斯马拉出发,沿着蜿蜒曲折的盘山', '互理解、相互尊重。我希望未来与中国同行', '据厄特孔院中方院长黄鸣飞介绍,这所', '出更多精美作品,也把厄特文化分享给更多', '公路一路向东寻找丝路印迹。驱车两个小', '加强合作,共同向世界展示非洲和亚洲的灿', '孔院成立于2013年3月,由贵州财经大学和', '的中国朋友。”', '时,记者来到位于厄立特里亚港口城市马萨', '烂文明。”', '谈起在中国求学的经历,约翰娜记忆犹', '新:“中国的发展在当今世界是独一无二的。', '沿着中国特色社会主义道路坚定前行,中国', '创造了发展奇迹,这一切都离不开中国共产党', '的领导。中国的发展经验值得许多国家学习', '借鉴,”', '正在西南大学学习的厄立特里亚博士生', '穆卢盖塔·泽穆伊对中国怀有深厚感情。8', '年前,在北京师范大学获得硕士学位后,穆卢', '盖塔在社交媒体上写下这样一段话:“这是我', '人生的重要一步,自此我拥有了一双坚固的', '鞋子.赋予我穿越荆棘的力量。”', '“鲜花曾告诉我你怎样走过,大地知道你', '心中的每一个角落"厄立特里亚阿斯马拉', '大学综合楼二层,一阵优美的歌声在走廊里回', '响。循着熟悉的旋律轻轻推开一间教室的门,', '学生们正跟着老师学唱中文歌曲《同一首歌》。', '这是厄特孔院阿斯马拉大学教学点的一', '节中文歌曲课。为了让学生们更好地理解歌', '词大意,老师尤斯拉·穆罕默德萨尔·侯赛因逐', '字翻译和解释歌词。随着伴奏声响起,学生们', '边唱边随着节拍摇动身体,现场气氛热烈。'], 'rec_scores': array([0.99972075, ..., 0.96241361]), 'rec_polys': array([[[133, 35],
...,
[133, 131]],
...,
[[ 13, 754],
...,
[ 13, 777]]], dtype=int16), 'rec_boxes': array([[133, ..., 131],
...,
[ 13, ..., 777]], dtype=int16)}}}
paddlex --pipeline formula_recognition \
--input https://paddle-model-ecology.bj.bcebos.com/paddlex/demo_image/pipelines/general_formula_recognition_001.png \
--use_layout_detection True \
--use_doc_orientation_classify False \
--use_doc_unwarping False \
--layout_threshold 0.5 \
--layout_nms True \
--layout_unclip_ratio 1.0 \
--layout_merge_bboxes_mode "'large'"\
--save_path ./output \
--device gpu:0
查看运行结果
{'res': {'input_path': 'general_formula_recognition.png', 'model_settings': {'use_doc_preprocessor': False,'use_layout_detection': True}, 'layout_det_res': {'input_path': None, 'boxes': [{'cls_id': 2, 'label': 'text', 'score': 0.9778407216072083, 'coordinate': [271.257, 648.50824, 1040.2291, 774.8482]}, ...]}, 'formula_res_list': [{'rec_formula': '\\small\\begin{aligned}{p(\\mathbf{x})=c(\\mathbf{u})\\prod_{i}p(x_{i}).}\\\\ \\end{aligned}', 'formula_region_id': 1, 'dt_polys': ([553.0718, 802.0996, 758.75635, 853.093],)}, ...]}}

paddlex --pipeline seal_recognition \
--input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/seal_text_det.png \
--use_doc_orientation_classify False \
--use_doc_unwarping False \
--device gpu:0 \
--save_path ./output
查看运行结果
{'res': {'input_path': 'seal_text_det.png', 'model_settings': {'use_doc_preprocessor': False, 'use_layout_detection': True}, 'layout_det_res': {'input_path': None, 'page_index': None, 'boxes': [{'cls_id': 16, 'label': 'seal', 'score': 0.975531280040741, 'coordinate': [6.195526, 0.1579895, 634.3982, 628.84595]}]}, 'seal_res_list': [{'input_path': None, 'page_index': None, 'model_settings': {'use_doc_preprocessor': False, 'use_textline_orientation': False}, 'dt_polys': [array([[320, 38],
...,
[315, 38]]), array([[461, 347],
...,
[456, 346]]), array([[439, 445],
...,
[434, 444]]), array([[158, 468],
...,
[154, 466]])], 'text_det_params': {'limit_side_len': 736, 'limit_type': 'min', 'thresh': 0.2, 'box_thresh': 0.6, 'unclip_ratio': 0.5}, 'text_type': 'seal', 'textline_orientation_angles': array([-1, ..., -1]), 'text_rec_score_thresh': 0, 'rec_texts': ['天津君和缘商贸有限公司', '发票专用章', '吗繁物', '5263647368706'], 'rec_scores': array([0.9934051 , ..., 0.99139398]), 'rec_polys': [array([[320, 38],
...,
[315, 38]]), array([[461, 347],
...,
[456, 346]]), array([[439, 445],
...,
[434, 444]]), array([[158, 468],
...,
[154, 466]])], 'rec_boxes': array([], dtype=float64)}]}}


计算机视觉相关产线命令行使用
paddlex --pipeline image_classification --input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/general_image_classification_001.jpg --device gpu:0
查看运行结果
{'res': {'input_path': 'general_image_classification_001.jpg', 'page_index': None, 'class_ids': array([296, 170, 356, 258, 248], dtype=int32), 'scores': array([0.62736, 0.03752, 0.03256, 0.0323 , 0.03194], dtype=float32), 'label_names': ['ice bear, polar bear, Ursus Maritimus, Thalarctos maritimus', 'Irish wolfhound', 'weasel', 'Samoyed, Samoyede', 'Eskimo dog, husky']}}

paddlex --pipeline object_detection \
--input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/general_object_detection_002.png \
--threshold 0.5 \
--save_path ./output/ \
--device gpu:0
查看运行结果
{'res': {'input_path': 'general_object_detection_002.png', 'page_index': None, 'boxes': [{'cls_id': 49, 'label': 'orange', 'score': 0.8188614249229431, 'coordinate': [661.3518, 93.05823, 870.75903, 305.93713]}, {'cls_id': 47, 'label': 'apple', 'score': 0.7745078206062317, 'coordinate': [76.80911, 274.74905, 330.5422, 520.0428]}, {'cls_id': 47, 'label': 'apple', 'score': 0.7271787524223328, 'coordinate': [285.32645, 94.3175, 469.73645, 297.40344]}, {'cls_id': 46, 'label': 'banana', 'score': 0.5576589703559875, 'coordinate': [310.8041, 361.43625, 685.1869, 712.59155]}, {'cls_id': 47, 'label': 'apple', 'score': 0.5490103363990784, 'coordinate': [764.6252, 285.76096, 924.8153, 440.92892]}, {'cls_id': 47, 'label': 'apple', 'score': 0.515821635723114, 'coordinate': [853.9831, 169.41423, 987.803, 303.58615]}, {'cls_id': 60, 'label': 'dining table', 'score': 0.514293372631073, 'coordinate': [0.53089714, 0.32445717, 1072.9534, 720]}, {'cls_id': 47, 'label': 'apple', 'score': 0.510750949382782, 'coordinate': [57.368027, 23.455347, 213.39601, 176.45612]}]}}

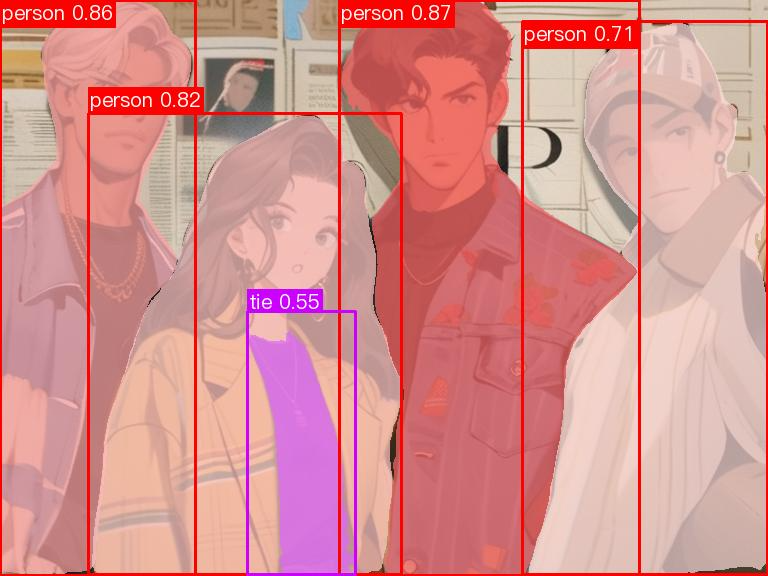
paddlex --pipeline instance_segmentation \
--input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/general_instance_segmentation_004.png \
--threshold 0.5 \
--save_path ./output \
--device gpu:0
查看运行结果
{'res': {'input_path': 'general_instance_segmentation_004.png', 'page_index': None, 'boxes': [{'cls_id': 0, 'label': 'person', 'score': 0.8695873022079468, 'coordinate': [339.83426, 0, 639.8651, 575.22003]}, {'cls_id': 0, 'label': 'person', 'score': 0.8572642803192139, 'coordinate': [0.09976959, 0, 195.07274, 575.358]}, {'cls_id': 0, 'label': 'person', 'score': 0.8201770186424255, 'coordinate': [88.24664, 113.422424, 401.23077, 574.70197]}, {'cls_id': 0, 'label': 'person', 'score': 0.7110118269920349, 'coordinate': [522.54065, 21.457964, 767.5007, 574.2464]}, {'cls_id': 27, 'label': 'tie', 'score': 0.5543721914291382, 'coordinate': [247.38776, 312.4094, 355.2685, 574.1264]}], 'masks': '...'}}


paddlex --pipeline small_object_detection \
--input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/small_object_detection.jpg \
--threshold 0.5 \
--save_path ./output \
--device gpu:0
查看运行结果
{'res': {'input_path': 'small_object_detection.jpg', 'page_index': None, 'boxes': [{'cls_id': 0, 'label': 'pedestrian', 'score': 0.8182944655418396, 'coordinate': [203.60147, 701.3809, 224.2007, 743.8429]}, {'cls_id': 0, 'label': 'pedestrian', 'score': 0.8150849342346191, 'coordinate': [185.01398, 710.8665, 201.76335, 744.9308]}, {'cls_id': 0, 'label': 'pedestrian', 'score': 0.7748839259147644, 'coordinate': [295.1978, 500.2161, 309.33438, 532.0253]}, {'cls_id': 0, 'label': 'pedestrian', 'score': 0.7688254714012146, 'coordinate': [851.5233, 436.13293, 863.2146, 466.8981]}, {'cls_id': 0, 'label': 'pedestrian', 'score': 0.689735472202301, 'coordinate': [802.1584, 460.10693, 815.6586, 488.85086]}, {'cls_id': 0, 'label': 'pedestrian', 'score': 0.6697502136230469, 'coordinate': [479.947, 309.43323, 489.1534, 332.5485]}, ...]}}

paddlex --pipeline human_keypoint_detection \
--input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/keypoint_detection_001.jpg \
--det_threshold 0.5 \
--save_path ./output/ \
--device gpu:0
查看运行结果
{'res': {'input_path': 'keypoint_detection_001.jpg', 'boxes': [{'coordinate': [325.65088, 74.46718, 391.5512, 209.46529], 'det_score': 0.9316536784172058, 'keypoints': array([[351.6419 , 84.80058 , 0.79337054],
[353.9377 , 82.47209 , 0.7778817 ],
[349.12946 , 83.09801 , 0.7885327 ],
[359.24466 , 83.369225 , 0.80503 ],
[347.46167 , 84.1535 , 0.8710606 ],
[368.82172 , 101.33514 , 0.88625187],
[339.8064 , 99.65537 , 0.8432633 ],
[371.2092 , 123.35563 , 0.7728337 ],
[337.78214 , 121.36371 , 0.9310819 ],
[368.81366 , 142.71593 , 0.79723483],
[337.53455 , 139.85892 , 0.877297 ],
[363.0265 , 141.82988 , 0.7964988 ],
[345.3075 , 141.98972 , 0.7532031 ],
[374.60806 , 171.42578 , 0.7530604 ],
[339.11694 , 167.98814 , 0.7255032 ],
[382.67047 , 197.82553 , 0.73685765],
[336.79745 , 196.5194 , 0.626142 ]], dtype=float32), 'kpt_score': 0.7961825}, {'coordinate': [271.96713, 69.02892, 336.77832, 217.54662], 'det_score': 0.9304604530334473, 'keypoints': array([[294.48553 , 84.144104 , 0.74851245],
[297.09854 , 80.97825 , 0.7341483 ],
[292.39313 , 81.7721 , 0.74603605],
[302.3231 , 81.528275 , 0.7586238 ],
[290.6292 , 83.26544 , 0.7514231 ],
[313.32928 , 98.40588 , 0.83778954],
[286.23532 , 101.702194 , 0.91927457],
[321.99515 , 120.05991 , 0.90197486],
[282.39294 , 122.16547 , 0.74502975],
[327.164 , 141.25995 , 0.8172762 ],
[279.1632 , 133.16023 , 0.59161717],
[311.02557 , 142.31526 , 0.82111686],
[294.72357 , 143.42067 , 0.71559554],
[313.98828 , 174.17151 , 0.7495116 ],
[291.76605 , 174.39961 , 0.7645517 ],
[321.4924 , 202.4499 , 0.7817023 ],
[293.70663 , 204.9227 , 0.72405976]], dtype=float32), 'kpt_score': 0.77107316}, {'coordinate': [293.55933, 188.65804, 419.47382, 305.4712], 'det_score': 0.9179267883300781, 'keypoints': array([[3.3565637e+02, 2.0941801e+02, 8.1438643e-01],
[3.3636591e+02, 2.0724442e+02, 7.7529407e-01],
[3.3486487e+02, 2.0653752e+02, 8.3719862e-01],
[3.4387805e+02, 2.0405179e+02, 7.9793924e-01],
[3.4104437e+02, 2.0354083e+02, 6.7090714e-01],
[3.5167136e+02, 2.1253050e+02, 5.9533423e-01],
[3.5493774e+02, 2.1316977e+02, 5.1632988e-01],
[3.2814764e+02, 2.1943013e+02, 5.3697169e-01],
[3.2577945e+02, 2.2027420e+02, 1.6555195e-01],
[3.1541614e+02, 2.2199020e+02, 5.2568728e-01],
[3.1139435e+02, 2.2925937e+02, 2.2075935e-01],
[3.8441351e+02, 2.4341478e+02, 6.4083064e-01],
[3.8714008e+02, 2.4532764e+02, 6.4894527e-01],
[3.5143246e+02, 2.5615021e+02, 7.7424920e-01],
[3.7133820e+02, 2.7552402e+02, 5.8704698e-01],
[3.6274625e+02, 2.8303183e+02, 6.1670756e-01],
[4.0358893e+02, 2.9351334e+02, 4.2383862e-01]], dtype=float32), 'kpt_score': 0.5969399}, {'coordinate': [238.98825, 182.67476, 372.81628, 307.61395], 'det_score': 0.914400041103363, 'keypoints': array([[282.9012 , 208.31485 , 0.6685285 ],
[282.95908 , 204.36131 , 0.66104335],
[280.90683 , 204.54018 , 0.7281709 ],
[274.7831 , 204.04141 , 0.54541856],
[270.97324 , 203.04889 , 0.73486483],
[269.43472 , 217.63014 , 0.6707946 ],
[256.871 , 216.546 , 0.89603853],
[277.03226 , 238.2196 , 0.4412233 ],
[262.29578 , 241.33434 , 0.791063 ],
[292.90753 , 251.69914 , 0.4993091 ],
[285.6907 , 252.71925 , 0.7215052 ],
[279.36578 , 261.8949 , 0.6626504 ],
[270.43402 , 268.07068 , 0.80625033],
[311.96924 , 261.36716 , 0.67315185],
[309.32407 , 262.97354 , 0.72746485],
[345.22446 , 285.02255 , 0.60142016],
[334.69235 , 291.57108 , 0.7674925 ]], dtype=float32), 'kpt_score': 0.6821406}, {'coordinate': [66.23172, 93.531204, 124.48463, 217.99655], 'det_score': 0.9086756110191345, 'keypoints': array([[ 91.04524 , 108.79487 , 0.8234256 ],
[ 92.67917 , 106.63517 , 0.79848343],
[ 88.41122 , 106.8017 , 0.8122996 ],
[ 95.353096 , 106.96488 , 0.85210425],
[ 84.35098 , 107.85205 , 0.971826 ],
[ 99.92103 , 119.87272 , 0.853371 ],
[ 79.69138 , 121.08684 , 0.8854925 ],
[103.019554 , 135.00996 , 0.73513967],
[ 72.38997 , 136.8782 , 0.7727014 ],
[104.561935 , 146.01869 , 0.8377464 ],
[ 72.70636 , 151.44576 , 0.67577386],
[ 98.69484 , 151.30742 , 0.8381225 ],
[ 85.946 , 152.07056 , 0.7904873 ],
[106.64397 , 175.77159 , 0.8179414 ],
[ 84.6963 , 178.4353 , 0.8094256 ],
[111.30463 , 201.2306 , 0.74394226],
[ 80.08708 , 204.05814 , 0.8457697 ]], dtype=float32), 'kpt_score': 0.8155325}, {'coordinate': [160.1294, 78.35935, 212.01868, 153.2241], 'det_score': 0.8295672535896301, 'keypoints': array([[1.89240387e+02, 9.08055573e+01, 7.36447990e-01],
[1.91318649e+02, 8.84640198e+01, 7.86390483e-01],
[1.87943207e+02, 8.88532104e+01, 8.23230743e-01],
[1.95832245e+02, 8.76751480e+01, 6.76276207e-01],
[1.86741409e+02, 8.96744080e+01, 7.87400603e-01],
[2.04019852e+02, 9.83068924e+01, 7.34004617e-01],
[1.85355087e+02, 9.81262970e+01, 6.23330474e-01],
[2.01501678e+02, 1.12709480e+02, 2.93740422e-01],
[1.80446320e+02, 1.11967369e+02, 5.50001860e-01],
[1.95137482e+02, 9.73322601e+01, 4.24658984e-01],
[1.74287552e+02, 1.21760696e+02, 3.51236403e-01],
[1.97997589e+02, 1.24219963e+02, 3.45360219e-01],
[1.83250824e+02, 1.22610085e+02, 4.38733459e-01],
[1.96233871e+02, 1.22864418e+02, 5.36903977e-01],
[1.66795364e+02, 1.25634903e+02, 3.78726840e-01],
[1.80727753e+02, 1.42604034e+02, 2.78717279e-01],
[1.75880920e+02, 1.41181213e+02, 1.70833692e-01]], dtype=float32), 'kpt_score': 0.5256467}, {'coordinate': [52.482475, 59.36664, 96.47121, 135.45993], 'det_score': 0.7726763486862183, 'keypoints': array([[ 73.98227 , 74.01257 , 0.71940714],
[ 75.44208 , 71.73432 , 0.6955297 ],
[ 72.20365 , 71.9637 , 0.6138198 ],
[ 77.7856 , 71.665825 , 0.73568064],
[ 69.342285 , 72.25549 , 0.6311799 ],
[ 83.1019 , 77.65522 , 0.7037722 ],
[ 64.89729 , 78.846565 , 0.56623787],
[ 85.16928 , 88.88764 , 0.5665537 ],
[ 61.65655 , 89.35312 , 0.4463089 ],
[ 80.01986 , 91.51777 , 0.30305162],
[ 70.90767 , 89.90153 , 0.48063472],
[ 78.70658 , 97.33488 , 0.39359188],
[ 68.3219 , 97.67902 , 0.41903985],
[ 80.69448 , 109.193985 , 0.14496553],
[ 65.57641 , 105.08109 , 0.27744702],
[ 79.44859 , 122.69015 , 0.17710638],
[ 64.03736 , 120.170425 , 0.46565098]], dtype=float32), 'kpt_score': 0.4905869}, {'coordinate': [7.081953, 80.3705, 46.81927, 161.72012], 'det_score': 0.6587498784065247, 'keypoints': array([[ 29.51531 , 91.49908 , 0.75517464],
[ 31.225754 , 89.82169 , 0.7765606 ],
[ 27.376017 , 89.71614 , 0.80448 ],
[ 33.515877 , 90.82257 , 0.7093001 ],
[ 23.521307 , 90.84212 , 0.777707 ],
[ 37.539314 , 101.381516 , 0.6913692 ],
[ 18.340288 , 102.41546 , 0.7203535 ],
[ 39.826218 , 113.37301 , 0.5913918 ],
[ 16.857304 , 115.10882 , 0.5492331 ],
[ 28.826103 , 121.861855 , 0.39205936],
[ 22.47133 , 120.69003 , 0.6120081 ],
[ 34.177963 , 126.15756 , 0.5601723 ],
[ 21.39047 , 125.30078 , 0.5064371 ],
[ 27.961575 , 133.33154 , 0.54826814],
[ 22.303364 , 129.8608 , 0.2293001 ],
[ 31.242027 , 153.047 , 0.36292207],
[ 21.80127 , 153.78947 , 0.30531448]], dtype=float32), 'kpt_score': 0.58188534}, {'coordinate': [126.131096, 30.263107, 168.5759, 134.09885], 'det_score': 0.6441988348960876, 'keypoints': array([[149.89236 , 43.87846 , 0.75441885],
[151.99484 , 41.95912 , 0.82070917],
[148.18002 , 41.775055 , 0.8453321 ],
[155.37967 , 42.06968 , 0.83349544],
[145.38167 , 41.69159 , 0.8233239 ],
[159.26329 , 53.284737 , 0.86246717],
[142.35178 , 51.206886 , 0.6940705 ],
[157.3975 , 71.31917 , 0.7624757 ],
[136.59795 , 66.40522 , 0.55612797],
[142.90988 , 78.28269 , 0.779243 ],
[135.43607 , 73.9765 , 0.5737738 ],
[155.7851 , 82.44225 , 0.6966109 ],
[143.4588 , 80.91763 , 0.60589534],
[153.45274 , 102.84818 , 0.62720954],
[131.59738 , 87.54947 , 0.4976839 ],
[155.56401 , 125.58888 , 0.5414401 ],
[139.57607 , 122.08866 , 0.26570275]], dtype=float32), 'kpt_score': 0.67882234}, {'coordinate': [112.50212, 64.127, 150.35353, 125.85529], 'det_score': 0.5013833045959473, 'keypoints': array([[1.35197662e+02, 7.29378281e+01, 5.58694899e-01],
[1.36285202e+02, 7.16439133e+01, 6.38598502e-01],
[1.33776855e+02, 7.16437454e+01, 6.36756659e-01],
[1.37833389e+02, 7.24015121e+01, 4.13749218e-01],
[1.31340057e+02, 7.30362549e+01, 5.70683837e-01],
[1.42542435e+02, 8.28875885e+01, 2.30803847e-01],
[1.29773300e+02, 8.52729874e+01, 4.94463116e-01],
[1.41332916e+02, 9.43963928e+01, 9.36751068e-02],
[1.28858521e+02, 9.95147858e+01, 2.72373617e-01],
[1.44981277e+02, 7.83604965e+01, 8.68032947e-02],
[1.34379593e+02, 8.23366165e+01, 1.67876005e-01],
[1.37895874e+02, 1.08476562e+02, 1.58305198e-01],
[1.30837265e+02, 1.07525513e+02, 1.45044222e-01],
[1.31290604e+02, 1.02961494e+02, 7.68775940e-02],
[1.17951675e+02, 1.07433502e+02, 2.09531561e-01],
[1.29175934e+02, 1.14402641e+02, 1.46551579e-01],
[1.27901909e+02, 1.16773926e+02, 2.08665460e-01]], dtype=float32), 'kpt_score': 0.3005561}]}}

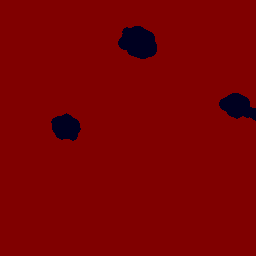
paddlex --pipeline open_vocabulary_segmentation \
--input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/open_vocabulary_segmentation.jpg \
--prompt_type box \
--prompt "[[112.9,118.4,513.8,382.1],[4.6,263.6,92.2,336.6],[592.4,260.9,607.2,294.2]]" \
--save_path ./output \
--device gpu:0
查看运行结果
{'res': {'input_path': 'open_vocabulary_segmentation.jpg', 'prompts': {'box_prompt': [[112.9, 118.4, 513.8, 382.1], [4.6, 263.6, 92.2, 336.6], [592.4, 260.9, 607.2, 294.2]]}, 'masks': '...', 'mask_infos': [{'label': 'box_prompt', 'prompt': [112.9, 118.4, 513.8, 382.1]}, {'label': 'box_prompt', 'prompt': [4.6, 263.6, 92.2, 336.6]}, {'label': 'box_prompt', 'prompt': [592.4, 260.9, 607.2, 294.2]}]}}

paddlex --pipeline open_vocabulary_detection \
--input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/open_vocabulary_detection.jpg \
--prompt "bus . walking man . rearview mirror ." \
--thresholds "{'text_threshold': 0.25, 'box_threshold': 0.3}" \
--save_path ./output \
--device gpu:0
查看运行结果
{'res': {'input_path': 'open_vocabulary_detection.jpg', 'page_index': None, 'boxes': [{'coordinate': [112.10542297363281, 117.93667602539062, 514.35693359375, 382.10150146484375], 'label': 'bus', 'score': 0.9348853230476379}, {'coordinate': [264.1828918457031, 162.6674346923828, 286.8844909667969, 201.86187744140625], 'label': 'rearview mirror', 'score': 0.6022508144378662}, {'coordinate': [606.1133422851562, 254.4973907470703, 622.56982421875, 293.7867126464844], 'label': 'walking man', 'score': 0.4384709894657135}, {'coordinate': [591.8192138671875, 260.2451171875, 607.3953247070312, 294.2210388183594], 'label': 'man', 'score': 0.3573091924190521}]}}

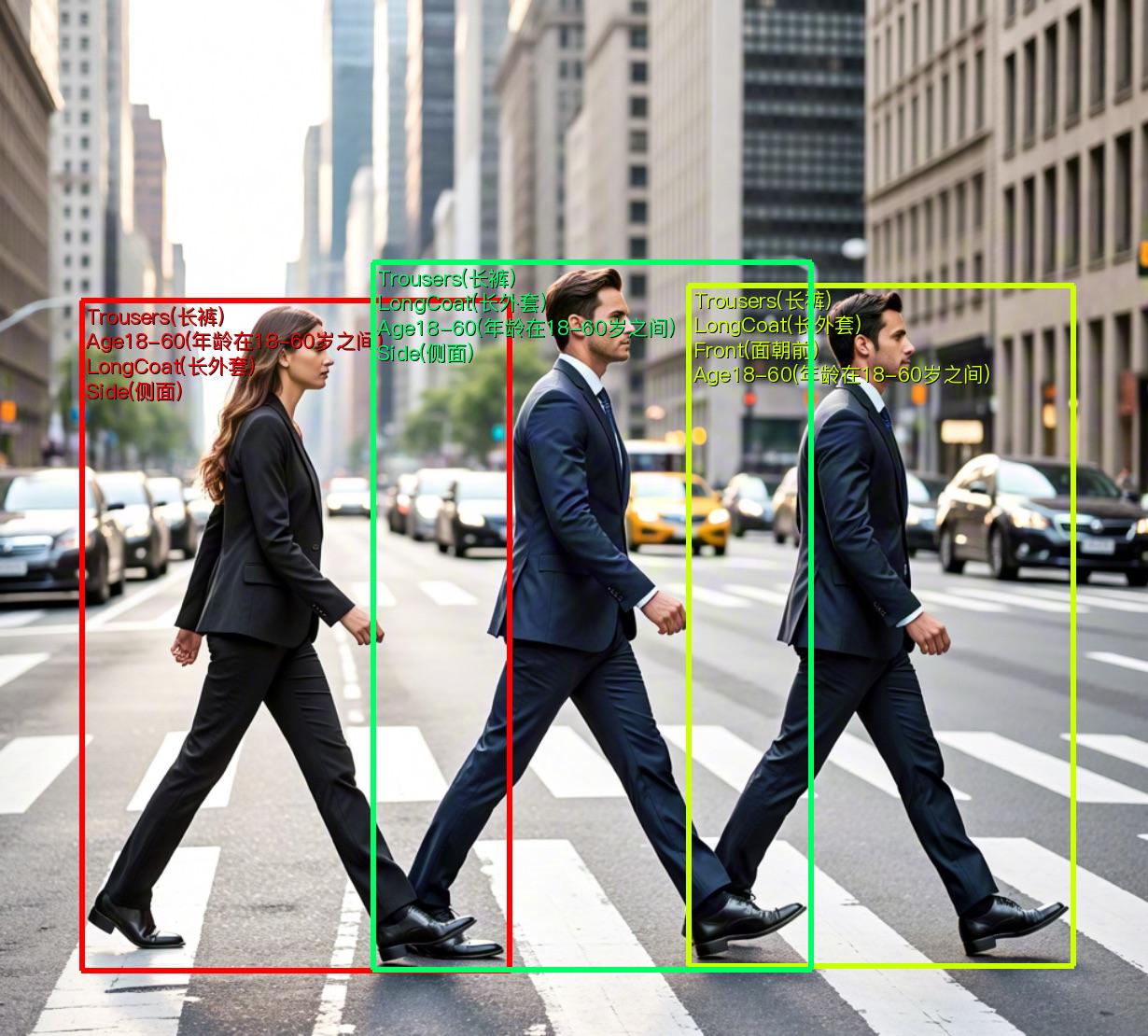
paddlex --pipeline pedestrian_attribute_recognition --input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/pedestrian_attribute_002.jpg --device gpu:0
查看运行结果
{'res': {'input_path': 'pedestrian_attribute_002.jpg', 'boxes': [{'labels': ['Trousers(长裤)', 'Age18-60(年龄在18-60岁之间)', 'LongCoat(长外套)', 'Side(侧面)'], 'cls_scores': array([0.99965, 0.99963, 0.98866, 0.9624 ]), 'det_score': 0.9795178771018982, 'coordinate': [87.24581, 322.5872, 546.2697, 1039.9852]}, {'labels': ['Trousers(长裤)', 'LongCoat(长外套)', 'Front(面朝前)', 'Age18-60(年龄在18-60岁之间)'], 'cls_scores': array([0.99996, 0.99872, 0.93379, 0.71614]), 'det_score': 0.967143177986145, 'coordinate': [737.91626, 306.287, 1150.5961, 1034.2979]}, {'labels': ['Trousers(长裤)', 'LongCoat(长外套)', 'Age18-60(年龄在18-60岁之间)', 'Side(侧面)'], 'cls_scores': array([0.99996, 0.99514, 0.98726, 0.96224]), 'det_score': 0.9645745754241943, 'coordinate': [399.45944, 281.9107, 869.5312, 1038.9962]}]}}
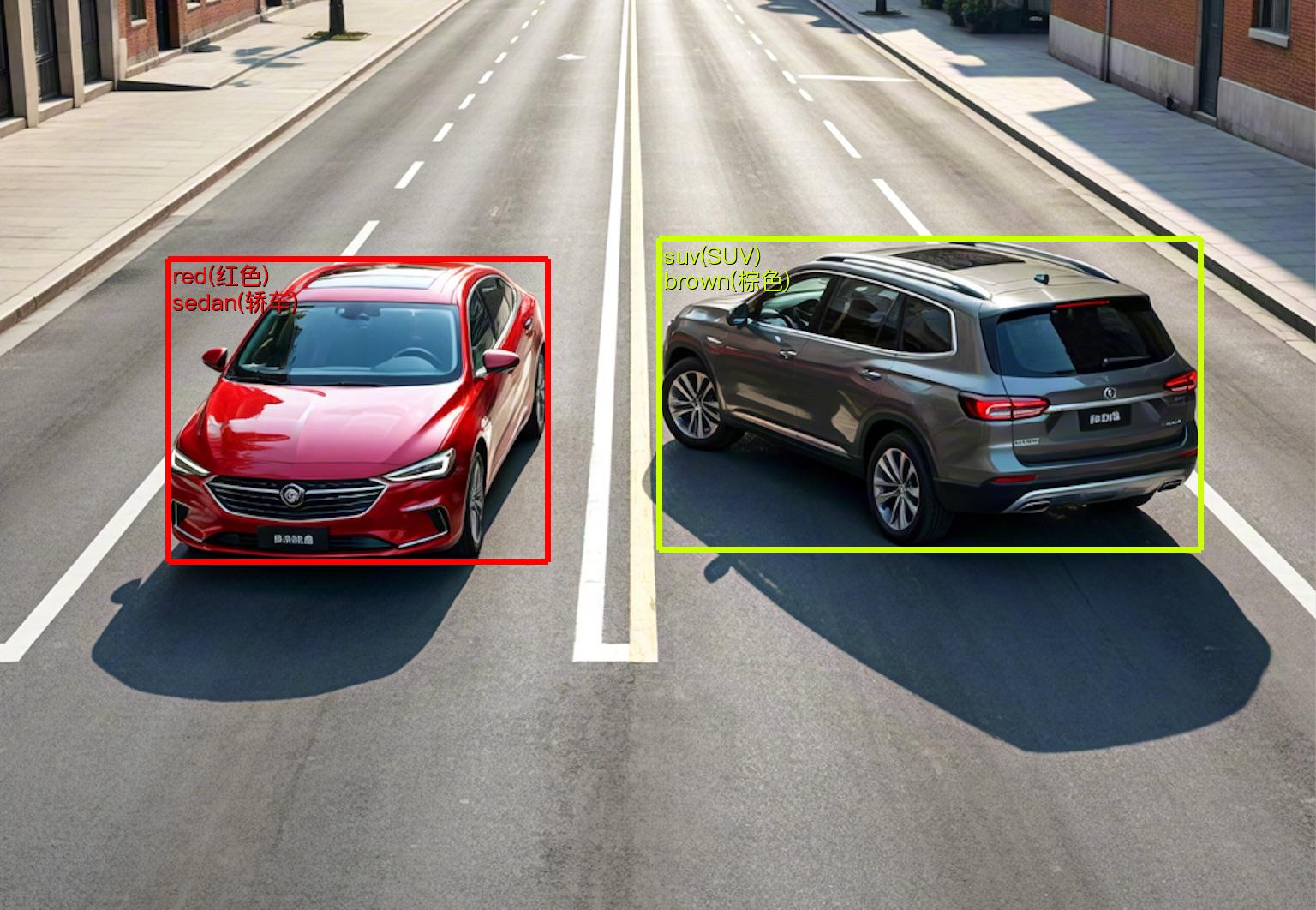
paddlex --pipeline vehicle_attribute_recognition --input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/vehicle_attribute_002.jpg --device gpu:0
查看运行结果
{'res': {'input_path': 'vehicle_attribute_002.jpg', 'boxes': [{'labels': ['red(红色)', 'sedan(轿车)'], 'cls_scores': array([0.96375, 0.94025]), 'det_score': 0.9774094820022583, 'coordinate': [196.32553, 302.3847, 639.3131, 655.57904]}, {'labels': ['suv(SUV)', 'brown(棕色)'], 'cls_scores': array([0.99968, 0.99317]), 'det_score': 0.9705657958984375, 'coordinate': [769.4419, 278.8417, 1401.0217, 641.3569]}]}}
paddlex --pipeline rotated_object_detection \
--input https://paddle-model-ecology.bj.bcebos.com/paddlex/imgs/demo_image/rotated_object_detection_001.png \
--threshold 0.5 \
--save_path ./output \
--device gpu:0
查看运行结果
{'res': {'input_path': 'rotated_object_detection_001.png', 'page_index': None, 'boxes': [{'cls_id': 4, 'label': 'small-vehicle', 'score': 0.7409099340438843, 'coordinate': [92.88687, 763.1569, 85.163124, 749.5868, 116.07975, 731.99414, 123.8035, 745.5643]}, {'cls_id': 4, 'label': 'small-vehicle', 'score': 0.7393015623092651, 'coordinate': [348.2332, 177.55974, 332.77704, 150.24973, 345.2183, 143.21028, 360.67444, 170.5203]}, {'cls_id': 11, 'label': 'roundabout', 'score': 0.8101699948310852, 'coordinate': [537.1732, 695.5475, 204.4297, 612.9735, 286.71338, 281.48022, 619.4569, 364.05426]}]}}

时序分析相关产线命令行使用
paddlex --pipeline ts_forecast --input https://paddle-model-ecology.bj.bcebos.com/paddlex/ts/demo_ts/ts_fc.csv --device gpu:0 --save_path ./output
查看运行结果
{'input_path': 'ts_fc.csv', 'forecast': OT
date
2018-06-26 20:00:00 9.586131
2018-06-26 21:00:00 9.379762
2018-06-26 22:00:00 9.252275
2018-06-26 23:00:00 9.249993
2018-06-27 00:00:00 9.164998
... ...
2018-06-30 15:00:00 8.830340
2018-06-30 16:00:00 9.291553
2018-06-30 17:00:00 9.097666
2018-06-30 18:00:00 8.905430
2018-06-30 19:00:00 8.993793
[96 rows x 1 columns]}
语音相关产线命令行使用
paddlex --pipeline multilingual_speech_recognition \
--input https://paddlespeech.bj.bcebos.com/PaddleAudio/zh.wav \
--save_path ./output \
--device gpu:0
查看运行结果
{'input_path': 'zh.wav', 'result': {'text': '我认为跑步最重要的就是给我带来了身体健康', 'segments': [{'id': 0, 'seek': 0, 'start': 0.0, 'end': 2.0, 'text': '我认为跑步最重要的就是', 'tokens': [50364, 1654, 7422, 97, 13992, 32585, 31429, 8661, 24928, 1546, 5620, 50464, 50464, 49076, 4845, 99, 34912, 19847, 29485, 44201, 6346, 115, 50564], 'temperature': 0, 'avg_logprob': -0.22779104113578796, 'compression_ratio': 0.28169014084507044, 'no_speech_prob': 0.026114309206604958}, {'id': 1, 'seek': 200, 'start': 2.0, 'end': 31.0, 'text': '给我带来了身体健康', 'tokens': [50364, 49076, 4845, 99, 34912, 19847, 29485, 44201, 6346, 115, 51814], 'temperature': 0, 'avg_logprob': -0.21976988017559052, 'compression_ratio': 0.23684210526315788, 'no_speech_prob': 0.009023111313581467}], 'language': 'zh'}}
视频相关产线命令行使用

paddlex --pipeline video_detection --input https://paddle-model-ecology.bj.bcebos.com/paddlex/videos/demo_video/HorseRiding.avi --device gpu:0 --save_path output
查看运行结果
{'input_path': 'HorseRiding.avi', 'result': [[[[110, 40, 170, 171], 0.8385784886274905, 'HorseRiding']], [[[112, 31, 168, 167], 0.8587647461352432, 'HorseRiding']], [[[106, 28, 164, 165], 0.8579590929730969, 'HorseRiding']], [[[106, 24, 165, 171], 0.8743957465404151, 'HorseRiding']], [[[107, 22, 165, 172], 0.8488322619908999, 'HorseRiding']], [[[112, 22, 173, 171], 0.8446755521458691, 'HorseRiding']], [[[115, 23, 177, 176], 0.8454028365262367, 'HorseRiding']], [[[117, 22, 178, 179], 0.8484261880748285, 'HorseRiding']], [[[117, 22, 181, 181], 0.8319480115446183, 'HorseRiding']], [[[117, 39, 182, 183], 0.820551099084625, 'HorseRiding']], [[[117, 41, 183, 185], 0.8202395831914338, 'HorseRiding']], [[[121, 47, 185, 190], 0.8261058921745246, 'HorseRiding']], [[[123, 46, 188, 196], 0.8307278306829033, 'HorseRiding']], [[[125, 44, 189, 197], 0.8259781361122833, 'HorseRiding']], [[[128, 47, 191, 195], 0.8227593229866699, 'HorseRiding']], [[[127, 44, 192, 193], 0.8205373129456817, 'HorseRiding']], [[[129, 39, 192, 185], 0.8223318812628619, 'HorseRiding']], [[[127, 31, 196, 179], 0.8501208612019866, 'HorseRiding']], [[[128, 22, 193, 171], 0.8315708410681566, 'HorseRiding']], [[[130, 22, 192, 169], 0.8318588228062005, 'HorseRiding']], [[[132, 18, 193, 170], 0.8310494469100611, 'HorseRiding']], [[[132, 18, 194, 172], 0.8302132445350239, 'HorseRiding']], [[[133, 18, 194, 176], 0.8339063714162727, 'HorseRiding']], [[[134, 26, 200, 183], 0.8365876380675275, 'HorseRiding']], [[[133, 16, 198, 182], 0.8395230321418268, 'HorseRiding']], [[[133, 17, 199, 184], 0.8198139782724922, 'HorseRiding']], [[[140, 28, 204, 189], 0.8344166596681291, 'HorseRiding']], [[[139, 27, 204, 187], 0.8412694521771158, 'HorseRiding']], [[[139, 28, 204, 185], 0.8500098862888805, 'HorseRiding']], [[[135, 19, 199, 179], 0.8506627974981384, 'HorseRiding']], [[[132, 15, 201, 178], 0.8495054272547193, 'HorseRiding']], [[[136, 14, 199, 173], 0.8451630721500223, 'HorseRiding']], [[[136, 12, 200, 167], 0.8366456814214907, 'HorseRiding']], [[[133, 8, 200, 168], 0.8457252233401213, 'HorseRiding']], [[[131, 7, 197, 162], 0.8400586356358062, 'HorseRiding']], [[[131, 8, 195, 163], 0.8320492682901985, 'HorseRiding']], [[[129, 4, 194, 159], 0.8298043752822792, 'HorseRiding']], [[[127, 5, 194, 162], 0.8348390851948722, 'HorseRiding']], [[[125, 7, 190, 164], 0.8299688814865505, 'HorseRiding']], [[[125, 6, 191, 164], 0.8303107088154711, 'HorseRiding']], [[[123, 8, 190, 168], 0.8348342187965798, 'HorseRiding']], [[[125, 14, 189, 170], 0.8356523950497134, 'HorseRiding']], [[[127, 18, 191, 171], 0.8392671764931521, 'HorseRiding']], [[[127, 30, 193, 178], 0.8441704160826191, 'HorseRiding']], [[[128, 18, 190, 181], 0.8438125326146775, 'HorseRiding']], [[[128, 12, 189, 186], 0.8390128962093542, 'HorseRiding']], [[[129, 15, 190, 185], 0.8471056476788448, 'HorseRiding']], [[[129, 16, 191, 184], 0.8536121834731034, 'HorseRiding']], [[[129, 16, 192, 185], 0.8488154629800881, 'HorseRiding']], [[[128, 15, 194, 184], 0.8417711698421471, 'HorseRiding']], [[[129, 13, 195, 187], 0.8412510238991473, 'HorseRiding']], [[[129, 14, 191, 187], 0.8404350980083457, 'HorseRiding']], [[[129, 13, 190, 189], 0.8382891279858882, 'HorseRiding']], [[[129, 11, 187, 191], 0.8318282305903217, 'HorseRiding']], [[[128, 8, 188, 195], 0.8043430817880264, 'HorseRiding']], [[[131, 25, 193, 199], 0.826184954516826, 'HorseRiding']], [[[124, 35, 191, 203], 0.8270462809459467, 'HorseRiding']], [[[121, 38, 191, 206], 0.8350931715324705, 'HorseRiding']], [[[124, 41, 195, 212], 0.8331239341053625, 'HorseRiding']], [[[128, 42, 194, 211], 0.8343046153103657, 'HorseRiding']], [[[131, 40, 192, 203], 0.8309784496027532, 'HorseRiding']], [[[130, 32, 195, 202], 0.8316640083647542, 'HorseRiding']], [[[135, 30, 196, 197], 0.8272172409555161, 'HorseRiding']], [[[131, 16, 197, 186], 0.8388410406147955, 'HorseRiding']], [[[134, 15, 202, 184], 0.8485738297037244, 'HorseRiding']], [[[136, 15, 209, 182], 0.8529430205135213, 'HorseRiding']], [[[134, 13, 218, 182], 0.8601191479922718, 'HorseRiding']], [[[144, 10, 213, 183], 0.8591963099263467, 'HorseRiding']], [[[151, 12, 219, 184], 0.8617965108346937, 'HorseRiding']], [[[151, 10, 220, 186], 0.8631923599955371, 'HorseRiding']], [[[145, 10, 216, 186], 0.8800860885204287, 'HorseRiding']], [[[144, 10, 216, 186], 0.8858840451538228, 'HorseRiding']], [[[146, 11, 214, 190], 0.8773644144886106, 'HorseRiding']], [[[145, 24, 214, 193], 0.8605544385867248, 'HorseRiding']], [[[146, 23, 214, 193], 0.8727294882672254, 'HorseRiding']], [[[148, 22, 212, 198], 0.8713131467067079, 'HorseRiding']], [[[146, 29, 213, 197], 0.8579099324651196, 'HorseRiding']], [[[154, 29, 217, 199], 0.8547794072847914, 'HorseRiding']], [[[151, 26, 217, 203], 0.8641733722316758, 'HorseRiding']], [[[146, 24, 212, 199], 0.8613466257602624, 'HorseRiding']], [[[142, 25, 210, 194], 0.8492670944810214, 'HorseRiding']], [[[134, 24, 204, 192], 0.8428117300203049, 'HorseRiding']], [[[136, 25, 204, 189], 0.8486779356971397, 'HorseRiding']], [[[127, 21, 199, 179], 0.8513896296400709, 'HorseRiding']], [[[125, 10, 192, 192], 0.8510201771386576, 'HorseRiding']], [[[124, 8, 191, 192], 0.8493999019508465, 'HorseRiding']], [[[121, 8, 192, 193], 0.8487097098892171, 'HorseRiding']], [[[119, 6, 187, 193], 0.847543279648022, 'HorseRiding']], [[[118, 12, 190, 190], 0.8503535936620565, 'HorseRiding']], [[[122, 22, 189, 194], 0.8427901493276977, 'HorseRiding']], [[[118, 24, 188, 195], 0.8418835400352087, 'HorseRiding']], [[[120, 25, 188, 205], 0.847192725785284, 'HorseRiding']], [[[122, 25, 189, 207], 0.8444105420674433, 'HorseRiding']], [[[120, 23, 189, 208], 0.8470784016639392, 'HorseRiding']], [[[121, 23, 188, 205], 0.843428111269418, 'HorseRiding']], [[[117, 23, 186, 206], 0.8420809714166708, 'HorseRiding']], [[[119, 5, 199, 197], 0.8288265053231356, 'HorseRiding']], [[[121, 8, 192, 195], 0.8197548738023599, 'HorseRiding']]]}

📝 Python 脚本使用¶
几行代码即可完成产线的快速推理,统一的 Python 脚本格式如下:
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline=[产线名称])
output = pipeline.predict([输入图片名称])
for res in output:
res.print()
res.save_to_img("./output/")
res.save_to_json("./output/")
create_pipeline()实例化产线对象- 传入图片并调用产线对象的
predict()方法进行推理预测 - 对预测结果进行处理
OCR相关产线Python脚本使用
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline="OCR")
output = pipeline.predict(
input="./general_ocr_002.png",
use_doc_orientation_classify=False,
use_doc_unwarping=False,
use_textline_orientation=False,
)
for res in output:
res.print()
res.save_to_img(save_path="./output/")
res.save_to_json(save_path="./output/")
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline="table_recognition")
output = pipeline.predict(
input="table_recognition.jpg",
use_doc_orientation_classify=False,
use_doc_unwarping=False,
)
for res in output:
res.print()
res.save_to_img("./output/")
res.save_to_xlsx("./output/")
res.save_to_html("./output/")
res.save_to_json("./output/")
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline="table_recognition_v2")
output = pipeline.predict(
input="table_recognition_v2.jpg",
use_doc_orientation_classify=False,
use_doc_unwarping=False,
)
for res in output:
res.print()
res.save_to_img("./output/")
res.save_to_xlsx("./output/")
res.save_to_html("./output/")
res.save_to_json("./output/")
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline="layout_parsing")
output = pipeline.predict(
input="./layout_parsing_demo.png",
use_doc_orientation_classify=False,
use_doc_unwarping=False,
use_textline_orientation=False,
)
for res in output:
res.print() ## 打印预测的结构化输出
res.save_to_img(save_path="./output/") ## 保存当前图像的所有子模块预测的可视化图像结果
res.save_to_json(save_path="./output/") ## 保存当前图像的结构化json结果
res.save_to_xlsx(save_path="./output/") ## 保存当前图像的子表格xlsx格式的结果
res.save_to_html(save_path="./output/") ## 保存当前图像的子表格html格式的结果
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline="PP-StructureV3")
output = pipeline.predict(
input="./pp_structure_v3_demo.png",
use_doc_orientation_classify=False,
use_doc_unwarping=False,
use_textline_orientation=False,
)
for res in output:
res.print()
res.save_to_json(save_path="output")
res.save_to_markdown(save_path="output")
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline="formula_recognition")
output = pipeline.predict(
input="./general_formula_recognition_001.png",
use_layout_detection=True ,
use_doc_orientation_classify=False,
use_doc_unwarping=False,
layout_threshold=0.5,
layout_nms=True,
layout_unclip_ratio=1.0,
layout_merge_bboxes_mode="large"
)
for res in output:
res.print()
res.save_to_img(save_path="./output/")
res.save_to_json(save_path="./output/")
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline="seal_recognition")
output = pipeline.predict(
"seal_text_det.png",
use_doc_orientation_classify=False,
use_doc_unwarping=False,
)
for res in output:
res.print() ## 打印预测的结构化输出
res.save_to_img("./output/") ## 保存可视化结果
res.save_to_json("./output/") ## 保存可视化结果
计算机视觉相关产线Python脚本使用
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline="image_classification")
output = pipeline.predict("general_image_classification_001.jpg")
for res in output:
res.print() ## 打印预测的结构化输出
res.save_to_img(save_path="./output/") ## 保存结果可视化图像
res.save_to_json(save_path="./output/") ## 保存预测的结构化输出
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline_name="semantic_segmentation")
output = pipeline.predict(input="general_semantic_segmentation_002.png", target_size=-1)
for res in output:
res.print()
res.save_to_img(save_path="./output/")
res.save_to_json(save_path="./output/")
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline="image_multilabel_classification")
output = pipeline.predict("general_image_classification_001.jpg")
for res in output:
res.print() ## 打印预测的结构化输出
res.save_to_img("./output/") ## 保存结果可视化图像
res.save_to_json("./output/") ## 保存预测的结构化输出
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline_name="open_vocabulary_segmentation")
output = pipeline.predict(input="open_vocabulary_segmentation.jpg", prompt_type="box", prompt=[[112.9,118.4,513.8,382.1],[4.6,263.6,92.2,336.6],[592.4,260.9,607.2,294.2]])
for res in output:
res.print()
res.save_to_img(save_path="./output/")
res.save_to_json(save_path="./output/")
from paddlex import create_pipeline
pipeline = create_pipeline(pipeline_name="open_vocabulary_detection")
output = pipeline.predict(input="open_vocabulary_detection.jpg", prompt="bus . walking man . rearview mirror .")
for res in output:
res.print()
res.save_to_img(save_path="./output/")
res.save_to_json(save_path="./output/")
时序分析相关产线Python脚本使用
语音相关产线Python脚本使用
视频相关产线Python脚本使用
多模态视觉语言模型相关产线Python脚本使用
🚀 详细教程¶
-
文档信息抽取v4
文档场景信息抽取v4(PP-ChatOCRv4-doc)是飞桨特色的文档和图像智能分析解决方案,结合了 LLM、MLLM 和 OCR 技术,一站式解决版面分析、生僻字、多页 pdf、表格、印章识别等常见的复杂文档信息抽取难点问题。
-
通用OCR
通用 OCR 产线用于解决文字识别任务,提取图片中的文字信息并以文本形式输出,基于端到端 OCR 串联系统,可实现 CPU 上毫秒级的文本内容精准预测,在通用场景上达到开源SOTA。
-
通用版面解析v3
通用版面解析v3产线在通用版面解析v1产线的基础上,强化了版面区域检测、表格识别、公式识别的能力,增加了多栏阅读顺序的恢复能力、结果转换 Markdown 文件的能力,在多种文档数据中,表现优异,可以处理较复杂的文档数据。
-
通用表格识别产线v2
通用表格识别产线v2用于解决表格识别任务,对图片中的表格进行识别,并以HTML格式输出。基于本产线,可实现对表格的精准预测,使用场景覆盖通用、制造、金融、交通等各个领域。
-
小目标检测
小目标检测是一种专门识别图像中体积较小物体的技术,广泛应用于监控、无人驾驶和卫星图像分析等领域。它能够从复杂场景中准确找到并分类像行人、交通标志或小动物等小尺寸物体。
-
时序预测
时序预测是一种利用历史数据来预测未来趋势的技术,通过分析时间序列数据的变化模式。广泛应用于金融市场、天气预报和销售预测等领域。
💬 Discussion¶
我们非常欢迎并鼓励社区成员在 Discussions 板块中提出问题、分享想法和反馈。无论您是想要报告一个 bug、讨论一个功能请求、寻求帮助还是仅仅想要了解项目的最新动态,这里都是一个绝佳的平台。