快速开始
AI Studio快速体验
本文通过一个简单的 demo 及其扩展问题,介绍如何使用 PaddleScience 训练模型,解决一类方程学习与预测问题,并可视化预测结果。
1. 问题简介
假设我们希望用神经网络模型去拟合 \(x \in [-\pi, \pi]\) 区间内,\(u=\sin(x)\) 这一函数。在拟合函数已知和未知两种情形下,如何去尽可能地准确拟合 \(u=\sin(x)\)。
第一种场景下,假设已知目标函数 \(u\) 的解析解就是 \(u=\sin(x)\),我们采用监督训练的思路,直接用该公式生成标签因变量 \(u\),与自变量 \(x\) 共同作为监督数据对模型进行训练。
第二种场景下,假设不知道目标函数 \(u\) 的解析解,但我们知道其满足某种微分关系,我们这里以其中一个满足条件的微分方程 \(\dfrac{\partial u} {\partial x}=\cos(x)\) 为例,介绍如何生成数据进行训练。
2. 场景一
目标拟合函数:
\[
u=\sin(x), x \in [-\pi, \pi].
\]
我们生成 \(N\) 组数据对 \((x_i, u_i), i=1,...,N\) 作为监督数据进行训练即可。
在撰写代码之前,我们首先导入必要的包。
| import ppsci
from ppsci.utils import logger
|
然后创建日志和模型保存目录供训练过程记录和保存使用,这一步是绝大部分案例在正式开始前都需要进行的操作。
| # set random seed(42) for reproducibility
ppsci.utils.misc.set_random_seed(42)
# set output directory
OUTPUT_DIR = "./output_quick_start_case1"
# initialize logger while create output directory
logger.init_logger("ppsci", f"{OUTPUT_DIR}/train.log", "info")
|
接下来正式开始撰写代码。
首先定义问题区间,我们使用 ppsci.geometry.Interval 定义一个线段几何形状,方便后续在该线段上对 \(x\) 进行采样。
| # set 1D-geometry domain([-π, π])
l_limit, r_limit = -np.pi, np.pi
x_domain = ppsci.geometry.Interval(l_limit, r_limit)
|
然后定义一个简单的 3 层 MLP 模型。
| # set model to 3-layer MLP
model = ppsci.arch.MLP(("x",), ("u",), 3, 64)
|
上述代码表示模型接受自变量 \(x\) 作为输入,输出预测结果 \(\hat{u}\)
然后我们定义已知的 \(u=\sin(x)\) 计算函数,作为 ppsci.constraint.InteriorConstraint 的参数,用于计算标签数据,InteriorConstraint 表示以给定的几何形状或数据集中的数据作为输入,联合给定的标签数据,指导模型进行优化。
| # standard solution of sin(x)
def sin_compute_func(data: dict):
return np.sin(data["x"])
# set constraint on 1D-geometry([-π, π])
ITERS_PER_EPOCH = 100 # use 100 iterations per training epoch
interior_constraint = ppsci.constraint.InteriorConstraint(
output_expr={"u": lambda out: out["u"]},
label_dict={"u": sin_compute_func},
geom=x_domain,
dataloader_cfg={
"dataset": "NamedArrayDataset",
"iters_per_epoch": ITERS_PER_EPOCH,
"sampler": {
"name": "BatchSampler",
"shuffle": True,
},
"batch_size": 32, # use 32 samples(points) per iteration for interior constraint
},
loss=ppsci.loss.MSELoss(),
)
# wrap constraint(s) into one dict
constraint = {
interior_constraint.name: interior_constraint,
}
|
此处的 interior_constraint 表示一个训练目标,即我们希望在 \([-\pi, \pi]\) 这段区间内,优化模型让模型的预测结果 \(\hat{u}\) 尽可能地接近它的标签值 \(u\)。
接下来就可以开始定义模型训练相关的内容,比如训练轮数、优化器、可视化器。
| # set training hyper-parameters
EPOCHS = 10
# set optimizer
optimizer = ppsci.optimizer.Adam(2e-3)(model)
# set visualizer
visual_input_dict = {
"x": np.linspace(l_limit, r_limit, 1000, dtype="float32").reshape(1000, 1)
}
visual_input_dict["u_ref"] = np.sin(visual_input_dict["x"])
visualizer = {
"visualize_u": ppsci.visualize.VisualizerScatter1D(
visual_input_dict,
("x",),
{"u_pred": lambda out: out["u"], "u_ref": lambda out: out["u_ref"]},
prefix="u=sin(x)",
),
}
|
最后将上述定义的对象传递给训练调度类 Solver,即可开始模型训练
| # initialize solver
solver = ppsci.solver.Solver(
model,
constraint,
OUTPUT_DIR,
optimizer,
epochs=EPOCHS,
iters_per_epoch=ITERS_PER_EPOCH,
visualizer=visualizer,
)
# train model
solver.train()
|
训练完毕后再用刚才取的 1000 个点与标准解计算 L2-相对误差
| # compute l2-relative error of trained model
pred_u = solver.predict(visual_input_dict, return_numpy=True)["u"]
l2_rel = np.linalg.norm(pred_u - visual_input_dict["u_ref"]) / np.linalg.norm(
visual_input_dict["u_ref"]
)
logger.info(f"l2_rel = {l2_rel:.5f}")
|
再对这 1000 个点的预测结果进行可视化
| # visualize prediction after finished training
solver.visualize()
|
训练记录下所示
...
...
ppsci INFO: [Train][Epoch 9/10][Iter 80/100] lr: 0.00200, loss: 0.00663, EQ: 0.00663, batch_cost: 0.00180s, reader_cost: 0.00011s, ips: 17756.64, eta: 0:00:00
ppsci INFO: [Train][Epoch 9/10][Iter 90/100] lr: 0.00200, loss: 0.00598, EQ: 0.00598, batch_cost: 0.00180s, reader_cost: 0.00011s, ips: 17793.97, eta: 0:00:00
ppsci INFO: [Train][Epoch 9/10][Iter 100/100] lr: 0.00200, loss: 0.00547, EQ: 0.00547, batch_cost: 0.00179s, reader_cost: 0.00011s, ips: 17864.08, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 10/100] lr: 0.00200, loss: 0.00079, EQ: 0.00079, batch_cost: 0.00182s, reader_cost: 0.00012s, ips: 17547.05, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 20/100] lr: 0.00200, loss: 0.00075, EQ: 0.00075, batch_cost: 0.00183s, reader_cost: 0.00011s, ips: 17482.92, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 30/100] lr: 0.00200, loss: 0.00077, EQ: 0.00077, batch_cost: 0.00182s, reader_cost: 0.00011s, ips: 17539.51, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 40/100] lr: 0.00200, loss: 0.00074, EQ: 0.00074, batch_cost: 0.00182s, reader_cost: 0.00011s, ips: 17587.51, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 50/100] lr: 0.00200, loss: 0.00071, EQ: 0.00071, batch_cost: 0.00182s, reader_cost: 0.00011s, ips: 17563.59, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 60/100] lr: 0.00200, loss: 0.00070, EQ: 0.00070, batch_cost: 0.00182s, reader_cost: 0.00011s, ips: 17604.60, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 70/100] lr: 0.00200, loss: 0.00074, EQ: 0.00074, batch_cost: 0.00181s, reader_cost: 0.00011s, ips: 17699.28, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 80/100] lr: 0.00200, loss: 0.00077, EQ: 0.00077, batch_cost: 0.00180s, reader_cost: 0.00011s, ips: 17764.92, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 90/100] lr: 0.00200, loss: 0.00075, EQ: 0.00075, batch_cost: 0.00180s, reader_cost: 0.00011s, ips: 17795.87, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 100/100] lr: 0.00200, loss: 0.00071, EQ: 0.00071, batch_cost: 0.00179s, reader_cost: 0.00011s, ips: 17872.00, eta: 0:00:00
训练完毕后再用刚才取的 1000 个点与标准解计算 L2-相对误差
| # compute l2-relative error of trained model
pred_u = solver.predict(visual_input_dict, return_numpy=True)["u"]
l2_rel = np.linalg.norm(pred_u - visual_input_dict["u_ref"]) / np.linalg.norm(
visual_input_dict["u_ref"]
)
logger.info(f"l2_rel = {l2_rel:.5f}")
|
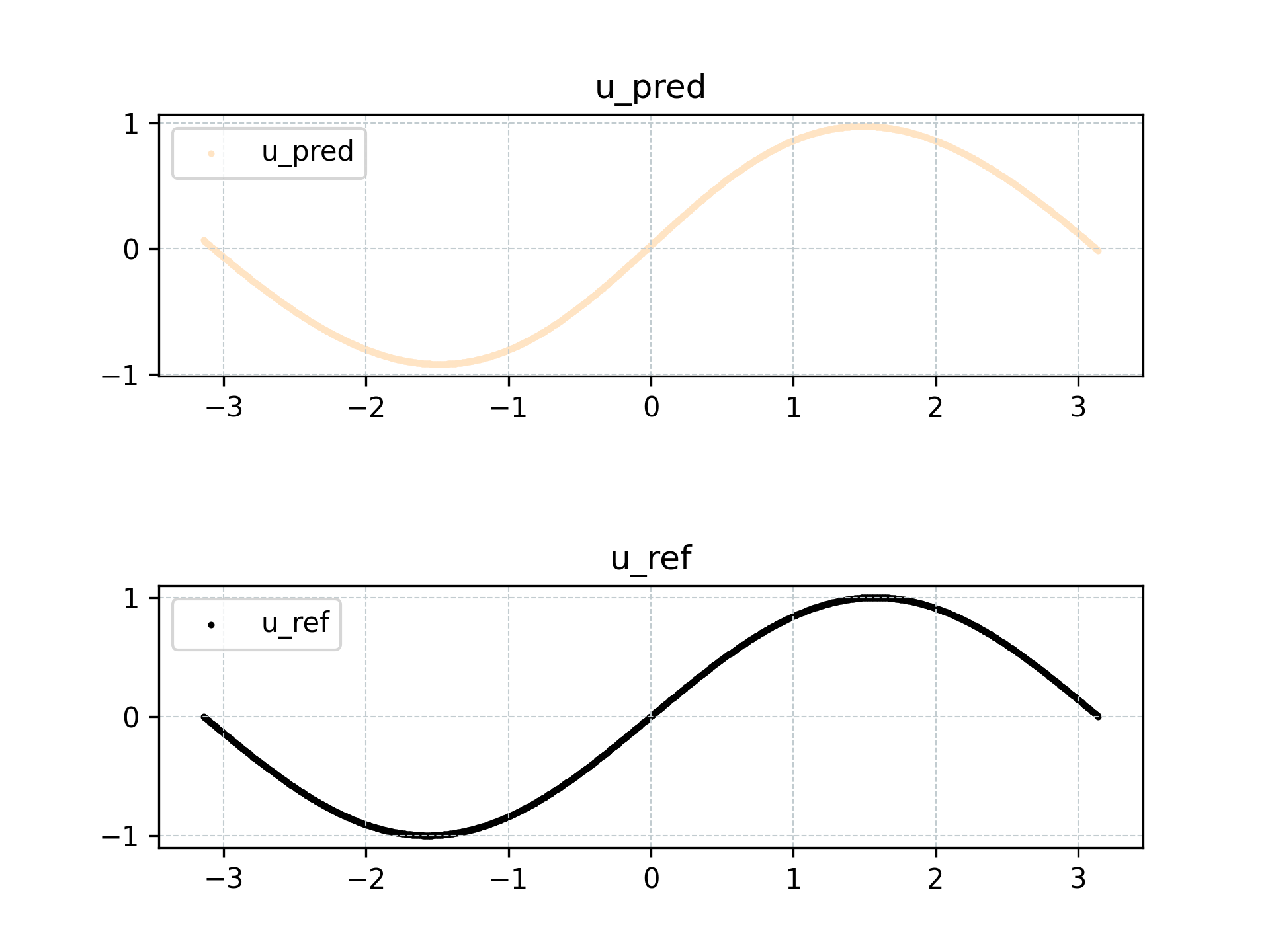
可以看到利用标准解监督训练模型,在标准解附近仍有很好的预测能力,L2-相对误差为 0.02677。
预测结果可视化如下所示
场景一的完整代码如下所示
| examples/quick_start/case1.py |
|---|
| import numpy as np
import ppsci
from ppsci.utils import logger
# set random seed(42) for reproducibility
ppsci.utils.misc.set_random_seed(42)
# set output directory
OUTPUT_DIR = "./output_quick_start_case1"
# initialize logger while create output directory
logger.init_logger("ppsci", f"{OUTPUT_DIR}/train.log", "info")
# set 1D-geometry domain([-π, π])
l_limit, r_limit = -np.pi, np.pi
x_domain = ppsci.geometry.Interval(l_limit, r_limit)
# set model to 3-layer MLP
model = ppsci.arch.MLP(("x",), ("u",), 3, 64)
# standard solution of sin(x)
def sin_compute_func(data: dict):
return np.sin(data["x"])
# set constraint on 1D-geometry([-π, π])
ITERS_PER_EPOCH = 100 # use 100 iterations per training epoch
interior_constraint = ppsci.constraint.InteriorConstraint(
output_expr={"u": lambda out: out["u"]},
label_dict={"u": sin_compute_func},
geom=x_domain,
dataloader_cfg={
"dataset": "NamedArrayDataset",
"iters_per_epoch": ITERS_PER_EPOCH,
"sampler": {
"name": "BatchSampler",
"shuffle": True,
},
"batch_size": 32, # use 32 samples(points) per iteration for interior constraint
},
loss=ppsci.loss.MSELoss(),
)
# wrap constraint(s) into one dict
constraint = {
interior_constraint.name: interior_constraint,
}
# set training hyper-parameters
EPOCHS = 10
# set optimizer
optimizer = ppsci.optimizer.Adam(2e-3)(model)
# set visualizer
visual_input_dict = {
"x": np.linspace(l_limit, r_limit, 1000, dtype="float32").reshape(1000, 1)
}
visual_input_dict["u_ref"] = np.sin(visual_input_dict["x"])
visualizer = {
"visualize_u": ppsci.visualize.VisualizerScatter1D(
visual_input_dict,
("x",),
{"u_pred": lambda out: out["u"], "u_ref": lambda out: out["u_ref"]},
prefix="u=sin(x)",
),
}
# initialize solver
solver = ppsci.solver.Solver(
model,
constraint,
OUTPUT_DIR,
optimizer,
epochs=EPOCHS,
iters_per_epoch=ITERS_PER_EPOCH,
visualizer=visualizer,
)
# train model
solver.train()
# compute l2-relative error of trained model
pred_u = solver.predict(visual_input_dict, return_numpy=True)["u"]
l2_rel = np.linalg.norm(pred_u - visual_input_dict["u_ref"]) / np.linalg.norm(
visual_input_dict["u_ref"]
)
logger.info(f"l2_rel = {l2_rel:.5f}")
# visualize prediction after finished training
solver.visualize()
|
3. 场景二
可以看到场景一的监督训练方式能较好地解决函数拟合问题,但一般情况下我们是无法得知拟合函数本身的解析式的,因此也无法直接构造因变量的监督数据。
虽然无法求出解析式直接构造监督数据,但往往可以利用相关数学知识,推导出目标拟合函数符合的某种数学关系,以训练模型以满足这种数学关系的方式,达到以“间接监督”的方式优化模型的目的。
假设我们不再使用 \(u=\sin(x)\) 这一先验公式,因而无法计算标签数据 \(u\)。因此使用如下方程组,其含有一个偏微分方程和边界条件
\[
\begin{cases}
\begin{aligned}
\dfrac{\partial u} {\partial x} &= \cos(x) \\
u(-\pi) &= 2
\end{aligned}
\end{cases}
\]
构造数据对 \((x_i, \cos(x_i)), i=1,...,N\)。
这意味着我们仍然能保持模型的输入、输出不变,但优化目标变成了:让 \(\dfrac{\partial \hat{u}} {\partial x}\) 尽可能地接近 \(\cos(x)\),且 \(\hat{u}(-\pi)\) 也要尽可能地接近 \(2\)。
基于以上理论,我们对场景一的代码进行少量的改写即可得到本场景二的代码。
首先由于我们需要使用一阶微分这一操作,因此在代码开头处需导入一阶微分 API
| import ppsci
from ppsci.autodiff import jacobian
from ppsci.utils import logger
|
然后在原来的标签计算函数下方,新增一个微分标签值计算函数
| # standard solution of cos(x)
def cos_compute_func(data: dict):
return np.cos(data["x"])
|
接着将 interior_constraint 这一约束条件从约束“模型输出”,改为约束“模型输出对输入的一阶微分”
| # set constraint on 1D-geometry([-π, π])
ITERS_PER_EPOCH = 100 # use 100 iterations per training epoch
interior_constraint = ppsci.constraint.InteriorConstraint(
output_expr={"du_dx": lambda out: jacobian(out["u"], out["x"])},
label_dict={"du_dx": cos_compute_func},
geom=x_domain,
dataloader_cfg={
"dataset": "NamedArrayDataset",
"iters_per_epoch": ITERS_PER_EPOCH,
"sampler": {
"name": "BatchSampler",
"shuffle": True,
},
"batch_size": 32, # use 32 samples(points) per iteration for interior constraint
},
loss=ppsci.loss.MSELoss(),
)
|
考虑到一般情况下偏微分方程的解会存在待定系数,需通过定解条件(初(边)值条件)来确定,因此需要在 interior_constraint 构建代码的后面,额外添加一个边界条件约束 bc_constraint,如下所示
| bc_constraint = ppsci.constraint.BoundaryConstraint(
{"u": lambda d: d["u"]},
{"u": lambda d: sin_compute_func(d) + 2}, # (1)
x_domain,
dataloader_cfg={
"dataset": "NamedArrayDataset",
"iters_per_epoch": ITERS_PER_EPOCH,
"sampler": {
"name": "BatchSampler",
"shuffle": True,
},
"batch_size": 1, # use 1 sample(point) per iteration for boundary constraint
},
loss=ppsci.loss.MSELoss(),
criteria=lambda x: np.isclose(x, l_limit),
)
|
- 对应边界条件 \(u(x_0)=sin(x_0)+2\)
然后将该边界约束 bc_constraint 添加到 constraint 中
| # wrap constraint(s) into one dict
constraint = {
interior_constraint.name: interior_constraint,
bc_constraint.name: bc_constraint,
}
|
同样地,修改 Visualizer 绘制的标准解为 \(sin(x)+2\)
| # set visualizer
visual_input_dict = {
"x": np.linspace(l_limit, r_limit, 1000, dtype="float32").reshape(1000, 1)
}
visual_input_dict["u_ref"] = np.sin(visual_input_dict["x"]) + 2.0
visualizer = {
"visualize_u": ppsci.visualize.VisualizerScatter1D(
visual_input_dict,
("x",),
{"u_pred": lambda out: out["u"], "u_ref": lambda out: out["u_ref"]},
prefix="u=sin(x)",
),
}
|
修改完毕后执行训练
| # initialize solver
solver = ppsci.solver.Solver(
model,
constraint,
OUTPUT_DIR,
optimizer,
epochs=EPOCHS,
iters_per_epoch=ITERS_PER_EPOCH,
visualizer=visualizer,
)
# train model
solver.train()
|
训练日志如下所示
...
...
ppsci INFO: [Train][Epoch 9/10][Iter 90/100] lr: 0.00200, loss: 0.00176, EQ: 0.00087, BC: 0.00088, batch_cost: 0.00346s, reader_cost: 0.00024s, ips: 9527.80, eta: 0:00:00
ppsci INFO: [Train][Epoch 9/10][Iter 100/100] lr: 0.00200, loss: 0.00170, EQ: 0.00087, BC: 0.00083, batch_cost: 0.00349s, reader_cost: 0.00024s, ips: 9452.07, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 10/100] lr: 0.00200, loss: 0.00107, EQ: 0.00072, BC: 0.00035, batch_cost: 0.00350s, reader_cost: 0.00025s, ips: 9424.75, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 20/100] lr: 0.00200, loss: 0.00116, EQ: 0.00083, BC: 0.00033, batch_cost: 0.00350s, reader_cost: 0.00025s, ips: 9441.33, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 30/100] lr: 0.00200, loss: 0.00103, EQ: 0.00079, BC: 0.00024, batch_cost: 0.00355s, reader_cost: 0.00025s, ips: 9291.90, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 40/100] lr: 0.00200, loss: 0.00108, EQ: 0.00078, BC: 0.00030, batch_cost: 0.00353s, reader_cost: 0.00025s, ips: 9348.09, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 50/100] lr: 0.00200, loss: 0.00163, EQ: 0.00082, BC: 0.00082, batch_cost: 0.00350s, reader_cost: 0.00024s, ips: 9416.24, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 60/100] lr: 0.00200, loss: 0.00160, EQ: 0.00083, BC: 0.00077, batch_cost: 0.00353s, reader_cost: 0.00024s, ips: 9345.73, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 70/100] lr: 0.00200, loss: 0.00150, EQ: 0.00082, BC: 0.00068, batch_cost: 0.00351s, reader_cost: 0.00024s, ips: 9393.89, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 80/100] lr: 0.00200, loss: 0.00146, EQ: 0.00081, BC: 0.00064, batch_cost: 0.00350s, reader_cost: 0.00024s, ips: 9424.81, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 90/100] lr: 0.00200, loss: 0.00138, EQ: 0.00081, BC: 0.00058, batch_cost: 0.00349s, reader_cost: 0.00024s, ips: 9444.12, eta: 0:00:00
ppsci INFO: [Train][Epoch 10/10][Iter 100/100] lr: 0.00200, loss: 0.00133, EQ: 0.00079, BC: 0.00054, batch_cost: 0.00349s, reader_cost: 0.00024s, ips: 9461.54, eta: 0:00:00
训练完毕后再用刚才取的 1000 个点与标准解计算 L2-相对误差
| # compute l2-relative error of trained model
pred_u = solver.predict(visual_input_dict, return_numpy=True)["u"]
l2_rel = np.linalg.norm(pred_u - visual_input_dict["u_ref"]) / np.linalg.norm(
visual_input_dict["u_ref"]
)
logger.info(f"l2_rel = {l2_rel:.5f}")
|
可以看到利用微分方程训练的模型,在标准解附近仍有很好的预测能力,L2-相对误差为 0.00564。
预测结果可视化如下所示

可以发现利用微分关系训练的模型仍然具备良好的预测能力,并且结合定解条件,能学习出同时符合微分方程和定解条件的正确解模型。
场景二的完整代码如下所示
| import numpy as np
import ppsci
from ppsci.autodiff import jacobian
from ppsci.utils import logger
# set random seed(42) for reproducibility
ppsci.utils.misc.set_random_seed(42)
# set output directory
OUTPUT_DIR = "./output_quick_start_case2"
# initialize logger while create output directory
logger.init_logger("ppsci", f"{OUTPUT_DIR}/train.log", "info")
# set 1D-geometry domain([-π, π])
l_limit, r_limit = -np.pi, np.pi
x_domain = ppsci.geometry.Interval(l_limit, r_limit)
# set model to 3-layer MLP
model = ppsci.arch.MLP(("x",), ("u",), 3, 64)
# standard solution of sin(x)
def sin_compute_func(data: dict):
return np.sin(data["x"])
# standard solution of cos(x)
def cos_compute_func(data: dict):
return np.cos(data["x"])
# set constraint on 1D-geometry([-π, π])
ITERS_PER_EPOCH = 100 # use 100 iterations per training epoch
interior_constraint = ppsci.constraint.InteriorConstraint(
output_expr={"du_dx": lambda out: jacobian(out["u"], out["x"])},
label_dict={"du_dx": cos_compute_func},
geom=x_domain,
dataloader_cfg={
"dataset": "NamedArrayDataset",
"iters_per_epoch": ITERS_PER_EPOCH,
"sampler": {
"name": "BatchSampler",
"shuffle": True,
},
"batch_size": 32, # use 32 samples(points) per iteration for interior constraint
},
loss=ppsci.loss.MSELoss(),
)
bc_constraint = ppsci.constraint.BoundaryConstraint(
{"u": lambda d: d["u"]},
{"u": lambda d: sin_compute_func(d) + 2}, # (1)
x_domain,
dataloader_cfg={
"dataset": "NamedArrayDataset",
"iters_per_epoch": ITERS_PER_EPOCH,
"sampler": {
"name": "BatchSampler",
"shuffle": True,
},
"batch_size": 1, # use 1 sample(point) per iteration for boundary constraint
},
loss=ppsci.loss.MSELoss(),
criteria=lambda x: np.isclose(x, l_limit),
)
# wrap constraint(s) into one dict
constraint = {
interior_constraint.name: interior_constraint,
bc_constraint.name: bc_constraint,
}
# set training hyper-parameters
EPOCHS = 10
# set optimizer
optimizer = ppsci.optimizer.Adam(2e-3)(model)
# set visualizer
visual_input_dict = {
"x": np.linspace(l_limit, r_limit, 1000, dtype="float32").reshape(1000, 1)
}
visual_input_dict["u_ref"] = np.sin(visual_input_dict["x"]) + 2.0
visualizer = {
"visualize_u": ppsci.visualize.VisualizerScatter1D(
visual_input_dict,
("x",),
{"u_pred": lambda out: out["u"], "u_ref": lambda out: out["u_ref"]},
prefix="u=sin(x)",
),
}
# initialize solver
solver = ppsci.solver.Solver(
model,
constraint,
OUTPUT_DIR,
optimizer,
epochs=EPOCHS,
iters_per_epoch=ITERS_PER_EPOCH,
visualizer=visualizer,
)
# train model
solver.train()
# compute l2-relative error of trained model
pred_u = solver.predict(visual_input_dict, return_numpy=True)["u"]
l2_rel = np.linalg.norm(pred_u - visual_input_dict["u_ref"]) / np.linalg.norm(
visual_input_dict["u_ref"]
)
logger.info(f"l2_rel = {l2_rel:.5f}")
# visualize prediction after finished training
solver.visualize()
|