# Copyright (c) 2023 PaddlePaddle Authors. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# Reference: https://github.com/lululxvi/deepxde/blob/master/examples/pinn_forward/Volterra_IDE.py
from os import path as osp
from typing import Dict
from typing import Tuple
import hydra
import numpy as np
import paddle
from matplotlib import pyplot as plt
from omegaconf import DictConfig
import ppsci
from ppsci.autodiff import jacobian
from ppsci.utils import logger
def train(cfg: DictConfig):
# set random seed for reproducibility
ppsci.utils.misc.set_random_seed(cfg.seed)
# set output directory
logger.init_logger("ppsci", osp.join(cfg.output_dir, "train.log"), "info")
# set model
model = ppsci.arch.MLP(**cfg.MODEL)
# set geometry
geom = {"timedomain": ppsci.geometry.TimeDomain(*cfg.BOUNDS)}
# set equation
def kernel_func(x, s):
return np.exp(s - x)
def func(out):
x, u = out["x"], out["u"]
return jacobian(u, x) + u
equation = {
"volterra": ppsci.equation.Volterra(
cfg.BOUNDS[0],
cfg.TRAIN.npoint_interior,
cfg.TRAIN.quad_deg,
kernel_func,
func,
)
}
# set constraint
# set transform for input data
def input_data_quad_transform(
input: Dict[str, np.ndarray],
weight: Dict[str, np.ndarray],
label: Dict[str, np.ndarray],
) -> Tuple[
Dict[str, paddle.Tensor], Dict[str, paddle.Tensor], Dict[str, paddle.Tensor]
]:
"""Get sampling points for integral.
Args:
input (Dict[str, paddle.Tensor]): Raw input dict.
weight (Dict[str, paddle.Tensor]): Raw weight dict.
label (Dict[str, paddle.Tensor]): Raw label dict.
Returns:
Tuple[ Dict[str, paddle.Tensor], Dict[str, paddle.Tensor], Dict[str, paddle.Tensor] ]:
Input dict contained sampling points, weight dict and label dict.
"""
x = input["x"] # N points.
x_quad = equation["volterra"].get_quad_points(x).reshape([-1, 1]) # NxQ
x_quad = paddle.concat((x, x_quad), axis=0) # M+MxQ: [M|Q1|Q2,...,QM|]
return (
{
**input,
"x": x_quad,
},
weight,
label,
)
# interior constraint
ide_constraint = ppsci.constraint.InteriorConstraint(
equation["volterra"].equations,
{"volterra": 0},
geom["timedomain"],
{
"dataset": {
"name": "IterableNamedArrayDataset",
"transforms": (
{
"FunctionalTransform": {
"transform_func": input_data_quad_transform,
},
},
),
},
"batch_size": cfg.TRAIN.npoint_interior,
"iters_per_epoch": cfg.TRAIN.iters_per_epoch,
},
ppsci.loss.MSELoss("mean"),
evenly=True,
name="EQ",
)
# initial condition
def u_solution_func(in_):
if isinstance(in_["x"], paddle.Tensor):
return paddle.exp(-in_["x"]) * paddle.cosh(in_["x"])
return np.exp(-in_["x"]) * np.cosh(in_["x"])
ic = ppsci.constraint.BoundaryConstraint(
{"u": lambda out: out["u"]},
{"u": u_solution_func},
geom["timedomain"],
{
"dataset": {"name": "IterableNamedArrayDataset"},
"batch_size": cfg.TRAIN.npoint_ic,
"iters_per_epoch": cfg.TRAIN.iters_per_epoch,
},
ppsci.loss.MSELoss("mean"),
criteria=geom["timedomain"].on_initial,
name="IC",
)
# wrap constraints together
constraint = {
ide_constraint.name: ide_constraint,
ic.name: ic,
}
# set optimizer
optimizer = ppsci.optimizer.LBFGS(**cfg.TRAIN.optimizer)(model)
# set validator
l2rel_validator = ppsci.validate.GeometryValidator(
{"u": lambda out: out["u"]},
{"u": u_solution_func},
geom["timedomain"],
{
"dataset": "IterableNamedArrayDataset",
"total_size": cfg.EVAL.npoint_eval,
},
ppsci.loss.L2RelLoss(),
evenly=True,
metric={"L2Rel": ppsci.metric.L2Rel()},
name="L2Rel_Validator",
)
validator = {l2rel_validator.name: l2rel_validator}
# initialize solver
solver = ppsci.solver.Solver(
model,
constraint,
cfg.output_dir,
optimizer,
epochs=cfg.TRAIN.epochs,
iters_per_epoch=cfg.TRAIN.iters_per_epoch,
eval_during_train=cfg.TRAIN.eval_during_train,
eval_freq=cfg.TRAIN.eval_freq,
equation=equation,
geom=geom,
validator=validator,
pretrained_model_path=cfg.TRAIN.pretrained_model_path,
checkpoint_path=cfg.TRAIN.checkpoint_path,
eval_with_no_grad=cfg.EVAL.eval_with_no_grad,
)
# train model
solver.train()
# visualize prediction after finished training
input_data = geom["timedomain"].uniform_points(100)
label_data = u_solution_func({"x": input_data})
output_data = solver.predict({"x": input_data}, return_numpy=True)["u"]
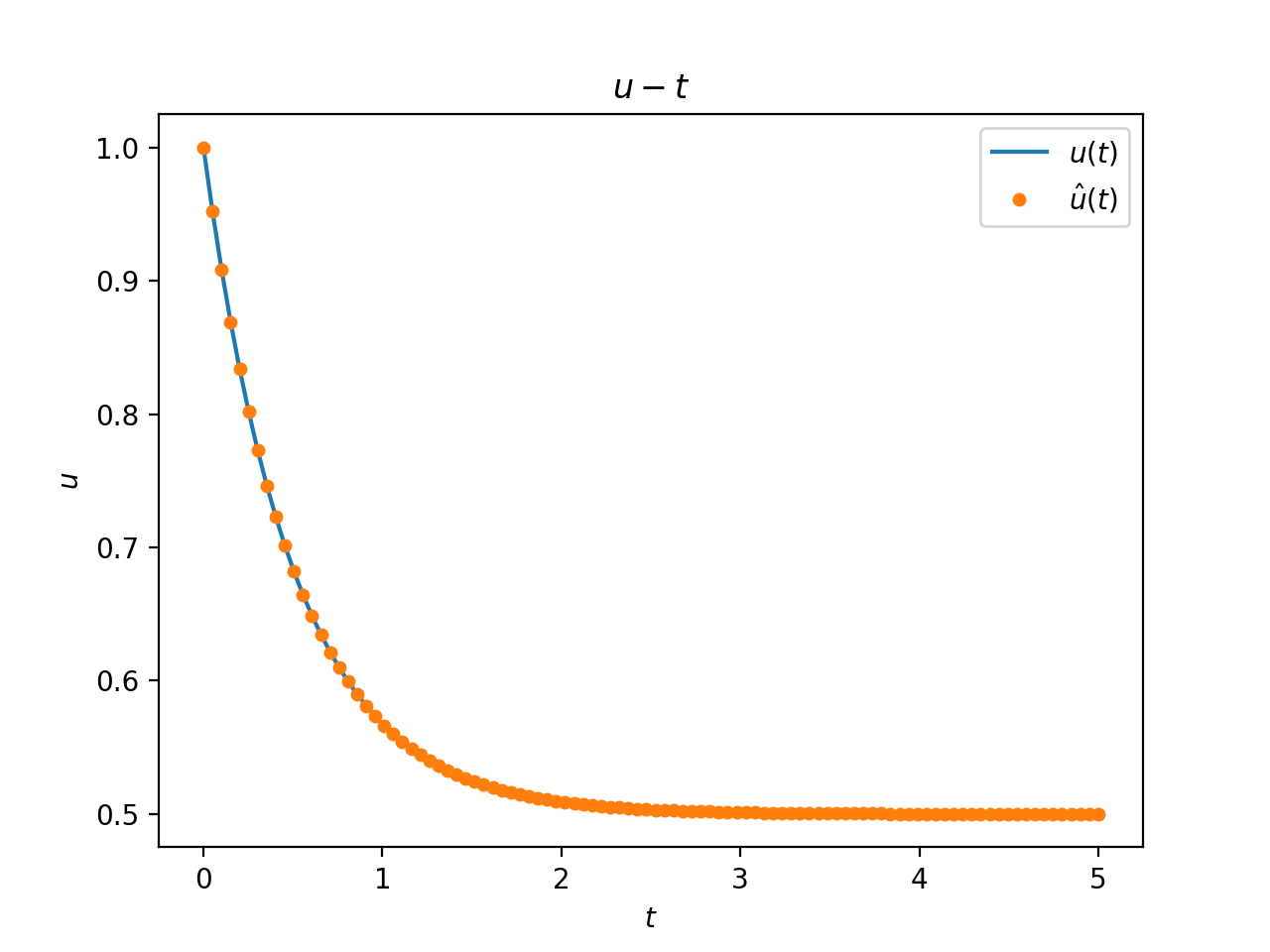
plt.plot(input_data, label_data, "-", label=r"$u(t)$")
plt.plot(input_data, output_data, "o", label=r"$\hat{u}(t)$", markersize=4.0)
plt.legend()
plt.xlabel(r"$t$")
plt.ylabel(r"$u$")
plt.title(r"$u-t$")
plt.savefig(osp.join(cfg.output_dir, "./Volterra_IDE.png"), dpi=200)
def evaluate(cfg: DictConfig):
# set random seed for reproducibility
ppsci.utils.misc.set_random_seed(cfg.seed)
# set output directory
logger.init_logger("ppsci", osp.join(cfg.output_dir, "eval.log"), "info")
# set model
model = ppsci.arch.MLP(**cfg.MODEL)
# set geometry
geom = {"timedomain": ppsci.geometry.TimeDomain(*cfg.BOUNDS)}
# set validator
def u_solution_func(in_) -> np.ndarray:
if isinstance(in_["x"], paddle.Tensor):
return paddle.exp(-in_["x"]) * paddle.cosh(in_["x"])
return np.exp(-in_["x"]) * np.cosh(in_["x"])
l2rel_validator = ppsci.validate.GeometryValidator(
{"u": lambda out: out["u"]},
{"u": u_solution_func},
geom["timedomain"],
{
"dataset": "IterableNamedArrayDataset",
"total_size": cfg.EVAL.npoint_eval,
},
ppsci.loss.L2RelLoss(),
evenly=True,
metric={"L2Rel": ppsci.metric.L2Rel()},
name="L2Rel_Validator",
)
validator = {l2rel_validator.name: l2rel_validator}
# initialize solver
solver = ppsci.solver.Solver(
model,
output_dir=cfg.output_dir,
geom=geom,
validator=validator,
pretrained_model_path=cfg.EVAL.pretrained_model_path,
eval_with_no_grad=cfg.EVAL.eval_with_no_grad,
)
# evaluate model
solver.eval()
# visualize prediction
input_data = geom["timedomain"].uniform_points(cfg.EVAL.npoint_eval)
label_data = u_solution_func({"x": input_data})
output_data = solver.predict({"x": input_data}, return_numpy=True)["u"]
plt.plot(input_data, label_data, "-", label=r"$u(t)$")
plt.plot(input_data, output_data, "o", label=r"$\hat{u}(t)$", markersize=4.0)
plt.legend()
plt.xlabel(r"$t$")
plt.ylabel(r"$u$")
plt.title(r"$u-t$")
plt.savefig(osp.join(cfg.output_dir, "./Volterra_IDE.png"), dpi=200)
def export(cfg: DictConfig):
# set model
model = ppsci.arch.MLP(**cfg.MODEL)
# initialize solver
solver = ppsci.solver.Solver(
model,
pretrained_model_path=cfg.INFER.pretrained_model_path,
)
# export model
from paddle.static import InputSpec
input_spec = [
{
key: InputSpec([None, 1], "float32", name=key)
for key in cfg.MODEL.input_keys
},
]
solver.export(input_spec, cfg.INFER.export_path)
def inference(cfg: DictConfig):
from deploy.python_infer import pinn_predictor
predictor = pinn_predictor.PINNPredictor(cfg)
# set geometry
geom = {"timedomain": ppsci.geometry.TimeDomain(*cfg.BOUNDS)}
input_data = geom["timedomain"].uniform_points(cfg.EVAL.npoint_eval)
input_dict = {"x": input_data}
output_dict = predictor.predict(
{key: input_dict[key] for key in cfg.MODEL.input_keys}, cfg.INFER.batch_size
)
# mapping data to cfg.INFER.output_keys
output_dict = {
store_key: output_dict[infer_key]
for store_key, infer_key in zip(cfg.MODEL.output_keys, output_dict.keys())
}
def u_solution_func(in_) -> np.ndarray:
if isinstance(in_["x"], paddle.Tensor):
return paddle.exp(-in_["x"]) * paddle.cosh(in_["x"])
return np.exp(-in_["x"]) * np.cosh(in_["x"])
label_data = u_solution_func({"x": input_data})
output_data = output_dict["u"]
# save result
plt.plot(input_data, label_data, "-", label=r"$u(t)$")
plt.plot(input_data, output_data, "o", label=r"$\hat{u}(t)$", markersize=4.0)
plt.legend()
plt.xlabel(r"$t$")
plt.ylabel(r"$u$")
plt.title(r"$u-t$")
plt.savefig("./Volterra_IDE_pred.png", dpi=200)
@hydra.main(version_base=None, config_path="./conf", config_name="volterra_ide.yaml")
def main(cfg: DictConfig):
if cfg.mode == "train":
train(cfg)
elif cfg.mode == "eval":
evaluate(cfg)
elif cfg.mode == "export":
export(cfg)
elif cfg.mode == "infer":
inference(cfg)
else:
raise ValueError(
f"cfg.mode should in ['train', 'eval', 'export', 'infer'], but got '{cfg.mode}'"
)
if __name__ == "__main__":
main()