VIV(vortex induced vibration)¶
| 预训练模型 | 指标 |
|---|---|
| viv_pretrained.pdparams viv_pretrained.pdeqn |
eta_l2/MSE.eta: 0.00875 eta_l2/MSE.f: 0.00921 |
1. 背景简介¶
涡激振动(Vortex-Induced Vibration,VIV)是一种流固耦合振动现象,主要发生在流体绕过柱体或管体时。在海洋工程和风工程中,这种振动现象具有重要应用。
在海洋工程中,涡激振动问题主要涉及海洋平台(如桩基、立管等)的涡激振动响应分析。这些平台在海流中运行,会受到涡激振动的影响。这种振动可能会导致平台结构的疲劳损伤,因此在进行海洋平台设计时,需要考虑这一问题。
在风工程中,涡激振动问题主要涉及风力发电机的涡激振动响应分析。风力发电机叶片在运行过程中受到气流的涡激振动,这种振动可能会导致叶片的疲劳损伤。为了确保风力发电机的安全运行,需要对这一问题进行深入的研究。
总之,涡激振动问题的应用主要涉及海洋工程和风工程领域,对于这些领域的发展具有重要意义。
当涡流脱落频率接近结构的固有频率时,圆柱会发生涡激振动,VIV系统相当于一个弹簧-阻尼系统:
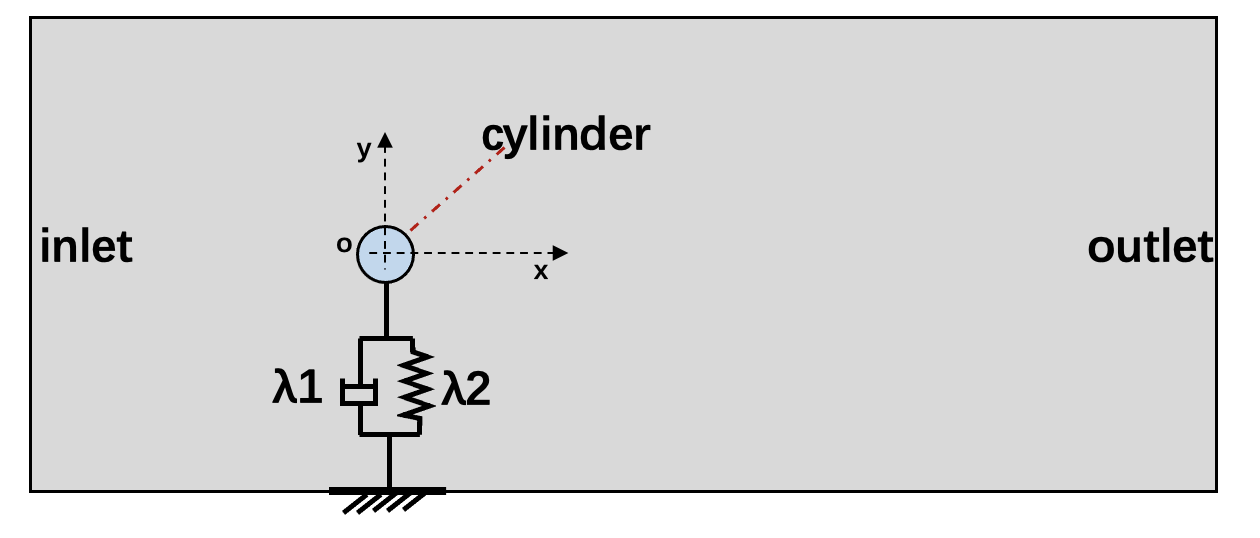
2. 问题定义¶
本问题涉及的控制方程涉及三个物理量:\(λ_1\)、\(λ_2\) 和 \(ρ\),分别表示自然阻尼、结构特性刚度和质量,控制方程定义如下所示:
该模型基于无量纲速度 \(U_r=\dfrac{u}{f_n*d}=8.5\) 对应 \(Re=500\) 的假设。我们使用通过圆柱的流体引起的圆柱振动的横向振幅 \(\eta\) 和相应的升力 \(f\) 作为监督数据。
3. 问题求解¶
接下来开始讲解如何将问题一步一步地转化为 PaddleScience 代码,用深度学习的方法求解该问题。 为了快速理解 PaddleScience,接下来仅对模型构建、方程构建、计算域构建等关键步骤进行阐述,而其余细节请参考 API文档。
3.1 模型构建¶
在 VIV 问题中,给定时间 \(t\),上述系统都有横向振幅 \(\eta\) 和升力 \(f\) 作为待求解的未知量,并且该系统本身还包含两个参数 \(\lambda_1, \lambda_2\)。因此我们在这里使用比较简单的 MLP(Multilayer Perceptron, 多层感知机) 来表示 \(t\) 到 \((\eta, f)\) 的映射函数 \(g: \mathbb{R}^1 \to \mathbb{R}^2\) ,即:
上式中 \(g\) 即为 MLP 模型本身,用 PaddleScience 代码表示如下
为了在计算时,准确快速地访问具体变量的值,我们在这里指定网络模型的输入变量名是 ("t_f",),输出变量名是 ("eta",),
t_f 代表输入时间 \(t\),eta 代表输出振幅 \(\eta\) 这些命名与后续代码保持一致。
接着通过指定 MLP 的层数、神经元个数以及激活函数,我们就实例化出了一个拥有 5 层隐藏神经元,每层神经元数为 50,使用 "tanh" 作为激活函数的神经网络模型 model。
3.2 方程构建¶
由于 VIV 使用的是 VIV 方程,因此可以直接使用 PaddleScience 内置的 VIV。
我们在该方程中添加了两个可学习的参数 k1 和 k2 来估计 \(\lambda_1\) 和 \(\lambda_2\),且它们的关系是 \(\lambda_1 = e^{k1}, \lambda_2 = e^{k2}\)
因此我们在实例化 VIV 类时需指定必要的参数:质量 rho=2,初始化值k1=-4,k2=0。
3.3 计算域构建¶
本文中 VIV 问题作用在 \(t \in [0.0625, 9.9375]\) 中的 100 个离散时间点上,这 100 个时间点已经保存在文件 examples/fsi/VIV_Training_Neta100.mat 作为输入数据,因此不需要显式构建计算域。
3.4 约束构建¶
本文采用监督学习的方式,对模型输出 \(\eta\) 和基于 \(\eta\) 计算出的升力 \(f\),这两个物理量进行约束。
3.4.1 监督约束¶
由于我们以监督学习方式进行训练,此处采用监督约束 SupervisedConstraint:
SupervisedConstraint 的第一个参数是监督约束的读取配置,此处填入在 3.2 方程构建 章节中实例化好的 train_dataloader_cfg;
第二个参数是损失函数,此处我们选用常用的MSE函数,且 reduction 设置为 "mean",即我们会将参与计算的所有数据点产生的损失项求和取平均;
第三个参数是方程表达式,用于描述如何计算约束目标,此处填入 eta 的计算函数和在 3.2 方程构建 章节中实例化好的 equation["VIV"].equations;
第四个参数是约束条件的名字,我们需要给每一个约束条件命名,方便后续对其索引。此处我们命名为 "Sup" 即可。
在监督约束构建完毕之后,以我们刚才的命名为关键字,封装到一个字典中,方便后续访问。
3.5 超参数设定¶
接下来我们需要指定训练轮数和学习率,此处我们按实验经验,使用 10000 轮训练轮数,并每隔 10000 个epochs评估一次模型精度。
3.6 优化器构建¶
训练过程会调用优化器来更新模型参数,此处选择较为常用的 Adam 优化器和 Step 间隔衰减学习率。
说明
VIV 方程含有两个 可学习参数 k1和k2,因此需要将方程与 model 一起传入优化器。
3.7 评估器构建¶
在训练过程中通常会按一定轮数间隔,用验证集(测试集)评估当前模型的训练情况,因此使用 ppsci.validate.SupervisedValidator 构建评估器。
评价指标 metric 选择 ppsci.metric.MSE 即可;
其余配置与 3.4.1 监督约束构建 的设置类似。
3.8 可视化器构建¶
在模型评估时,如果评估结果是可以可视化的数据,我们可以选择合适的可视化器来对输出结果进行可视化。
本文需要可视化的数据是 \(t-\eta\) 和 \(t-f\) 两组关系图,假设每个时刻 \(t\) 的坐标是 \(t_i\),则对应网络输出为 \(\eta_i\),升力为 \(f_i\),因此我们只需要将评估过程中产生的所有 \((t_i, \eta_i, f_i)\) 保存成图片即可。代码如下:
3.9 模型训练、评估与可视化¶
完成上述设置之后,只需要将上述实例化的对象按顺序传递给 ppsci.solver.Solver,然后启动训练、评估、可视化。
4. 完整代码¶
| viv.py | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 | |
5. 结果展示¶
模型预测结果如下所示,横轴为时间自变量\(t\),\(\eta_{gt}\)为参考振幅,\(\eta\)为模型预测振幅,\(f_{gt}\)为参考升力,\(f\)为模型预测升力。
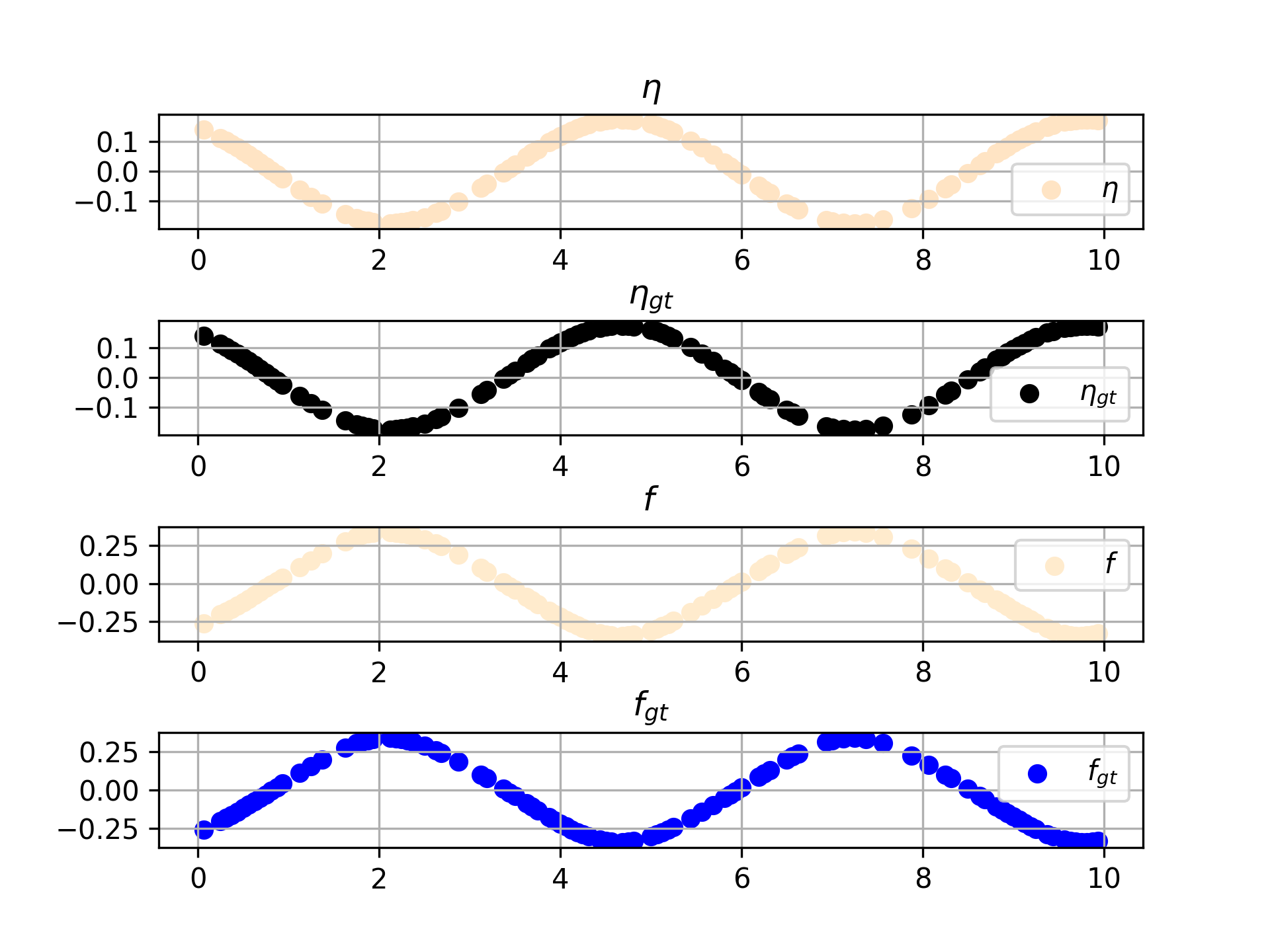
可以看到模型对在\([0,10]\)时间范围内,对振幅和升力的预测结果与参考结果基本一致。